一句話摘要:ESP32-S3 + INMP441 麥克風 + GC9A01 圓形螢幕,做一個會「跳舞」的圓形音頻頻譜儀,I2S + FFT + SPI 全流程教學。
ESP32-S3 + INMP441 + GC9A01 做一個會「跳舞」的圓形音頻頻譜儀完整教學(I2S + FFT + SPI)
難度:⭐⭐⭐☆☆(有點 Arduino 基礎就能上手) 預計時間:45 分鐘 測試環境: Arduino IDE 2.3.8 GFX Library for Arduino v1.6.5 arduinoFFT v2.0.4
TL;DR(不想看廢話版):
- 接線:INMP441 的 SD→GPIO4,WS→GPIO5,SCK→GPIO6,L/R 必須接 GND
- 接線:GC9A01 的 SCL→GPIO12,SDA→GPIO11,CS→GPIO9,DC→GPIO10,RST→GPIO18,BL→GPIO7
- 安裝函式庫:GFX Library for Arduino(作者 moononournation)+
arduinoFFT(作者 kosme)- 貼程式碼、燒錄、對著麥克風說話,圓圈裡的彩虹柱就跳起來了
前言
自從買了塊 1.28 吋圓形螢幕之後,都挺好玩的,圓形有很多場景跟方形不太一樣,現在我 就透過 INMP441 麥克風模組和它做一件特別好看的事:即時音頻頻譜視覺化。
你說「頻譜儀」,腦子裡可能先浮現出 Winamp 那種上世紀風格的長條柱(我 以前電腦上安裝過,聽著歌,看著頻頻的跳動可以看一下午)。但圓形的頻譜就不一樣了——16 條彩虹色柱子從圓心往外輻射,音量越大柱子越長,每條柱子頂端還有一個白色峰值光點緩緩下落……說實話,我 對著它發呆了五分鐘沒去吃飯。
本文手把手帶你用 ESP32-S3 + INMP441 數位麥克風 + GC9A01 圓形 TFT 螢幕,從接線到程式碼,做出一個即時回應聲音的圓形彩虹頻譜儀。有點基礎的 maker 跟著做,45 分鐘內能看到效果。
實驗效果
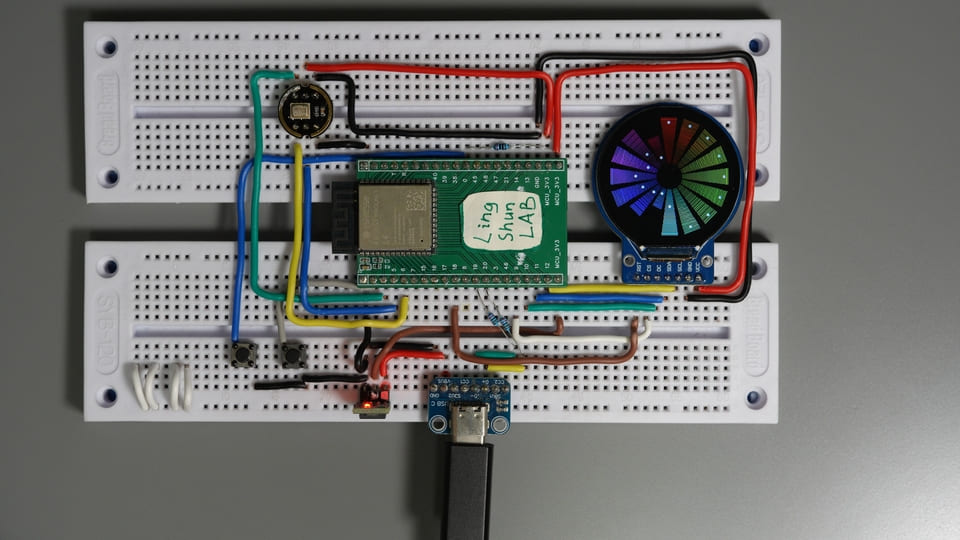
- 即時採集麥克風音頻(44.1kHz,16bit)
- 512 點 FFT 分析,分成 16 個頻段
- 圓形螢幕上彩虹柱從內向外輻射,峰值白點緩降
- 更新率約 20fps,肉眼看完全流暢
元件說明
GC9A01 圓形 TFT 螢幕
如果說普通矩形螢幕是「直板手機」,GC9A01 就是「智慧手錶錶盤」——1.28 吋圓形 LCD,驅動晶片就叫 GC9A01,走 SPI 匯流排,3.3V 工作,8 根線就能驅動。
| 參數 | 值 |
|---|---|
| 螢幕尺寸 | 1.28 吋 |
| 解析度 | 240 × 240 像素 |
| 介面 | SPI(4 線) |
| 工作電壓 | 3.3V |
| 驅動晶片 | GC9A01 |
| 面板類型 | IPS(全視角) |
選它的理由:市面上最常見的圓形小螢幕,Arduino_GFX 函式庫原生支援,5 行程式碼初始化,坑極少。
INMP441 MEMS 數位麥克風
INMP441 是一顆全向 MEMS 數位麥克風,說人話就是:它直接輸出數位 I2S 訊號,不用接 ADC。就像你請了一個同步翻譯,說什麼它幫你即時翻譯成 MCU 能懂的數位訊號,省去了類比訊號那一堆麻煩。
| 參數 | 值 |
|---|---|
| 介面 | I2S(數位音頻) |
| 工作電壓 | 1.8V ~ 3.3V |
| 頻率響應 | 60Hz ~ 15kHz |
| 訊噪比 | 61dBA |
| 靈敏度 | -26dBFS(典型值) |
| 拾音方向 | 全向 |
選它的理由:I2S 介面乾淨,不需要額外 ADC,訊噪比 61dBA 比大多數廉價類比咪頭強一截,做頻譜綽綽有餘。
值得注意的是 INMP441 原本由應美盛(InvenSense,後被 TDK 收購)生產,官方早已經將其列為 Obsolete(淘汰/停產) 狀態。在貿澤(Mouser)、得捷(DigiKey)等主流正規元器件經銷商處,它已經被打上了停產標籤。而市場上(如某寶、某多)大量幾塊錢一個的 INMP441 藍色/黑色小板子依然供貨充足。這主要是因為大陸市場仍有大量的庫存尾貨,或者市場上存在一些相容/翻新的國產晶片在繼續沿用這個名字。如果你只是做個人 DIY、寫教學或跑小 Demo,目前買到的模組依然能用。
因此,如果你是要開發產品這個型號的模組並不是首選。
BOM 表
| 元件 | 型號 / 規格 | 數量 |
|---|---|---|
| 主控開發板 | ESP32-S3(帶 USB-C) | 1 |
| 圓形 TFT 螢幕 | GC9A01,1.28 吋,240×240 | 1 |
| 數位麥克風 | INMP441 I2S 模組 | 1 |
| 杜邦線 | 若干 |
元件腳位說明
GC9A01 螢幕腳位
| 腳位 | 功能說明 |
|---|---|
| VCC | 電源正(接 3.3V) |
| GND | 電源負 |
| SCL / CLK | SPI 時脈 |
| SDA / MOSI | SPI 資料(主機傳送) |
| CS | 片選(低電位有效) |
| DC | 資料 / 命令選擇 |
| RST | 重置(低電位觸發) |
| BL | 背光控制(接 3.3V 常亮,或接 GPIO 用 PWM 調光) |
INMP441 麥克風腳位
| 腳位 | 功能說明 |
|---|---|
| VDD | 電源正(接 3.3V) |
| GND | 電源負 |
| SD | I2S 資料輸出(接 ESP32 資料輸入) |
| WS | 字時脈 / 幀同步(左右聲道選擇) |
| SCK | 位元時脈 |
| L/R | 聲道選擇:接 GND = 左聲道,接 3.3V = 右聲道,不能懸空 |
接線方式
建議接完一根對照表核對一根,能省 80% 的除錯時間。
GC9A01 螢幕接線
| 模組腳位 | ESP32-S3 | 線色參考 |
|---|---|---|
| VCC | 3.3V | 紅 |
| GND | GND | 灰 |
| SCL / CLK | GPIO12 | 黃 |
| SDA / MOSI | GPIO11 | 藍 |
| CS | GPIO9 | 綠 |
| DC | GPIO10 | 橙 |
| RST | GPIO18 | 紫 |
| BL | GPIO7 / 3.3V | 青 |
INMP441 麥克風接線
| 模組腳位 | ESP32-S3 | 線色參考 |
|---|---|---|
| VDD | 3.3V | 紅 |
| GND | GND | 灰 |
| SD | GPIO4 | 藍 |
| WS | GPIO5 | 綠 |
| SCK | GPIO6 | 黃 |
| L/R | GND(左聲道) | 灰 |
⚠️ L/R 必須接,不能懸空。 懸空會導致聲道選擇未定義,採集到的全是雜訊,頻譜柱會亂跳跟聲音毫無關係——別問我 怎麼知道的。
- 務必使用 3.3V 供電,不要接 5V
- INMP441 的 L/R 腳位接 GND = 左聲道輸出
- 先接好線,供電和接地線用萬用電表測試一下再通電,避免短路
需要安裝的函式庫
在 Arduino IDE → 工具 → 管理函式庫 中搜尋並安裝:
| 函式庫名稱 | 作者 | 測試通過版本 | 用途 |
|---|---|---|---|
Arduino_GFX_Library | moononournation | v1.6.5 | GC9A01 螢幕驅動 |
arduinoFFT | kosme | v2.0.4 | 快速傅立葉變換 |
I2S 驅動(
driver/i2s.h)是 ESP32 內建函式庫,不需要額外安裝。Arduino IDE 建議用 2.3.x 及以上版本,舊版 1.x 對 ESP32-S3 的支援不穩定。
完整程式碼
#include <Arduino_GFX_Library.h>
#include <driver/i2s.h>
#include <arduinoFFT.h>
// ====== 步驟 1:定義螢幕腳位 ======
#define TFT_SCK 12
#define TFT_MOSI 11
#define TFT_CS 9
#define TFT_DC 10
#define TFT_RST 18
#define TFT_BL 7
// ====== 步驟 2:定義麥克風腳位 ======
#define I2S_WS 5
#define I2S_SD 4
#define I2S_SCK 6
#define I2S_PORT I2S_NUM_0
// ====== FFT 參數 ======
#define SAMPLES 512
#define BANDS 16
// ====== 初始化 GC9A01 螢幕 ======
Arduino_DataBus *bus = new Arduino_ESP32SPI(
TFT_DC, TFT_CS, TFT_SCK, TFT_MOSI, -1);
Arduino_GFX *gfx = new Arduino_GC9A01(
bus, TFT_RST, 0, true);
// ====== FFT 緩衝區 ======
double vReal[SAMPLES];
double vImag[SAMPLES];
ArduinoFFT<double> FFT = ArduinoFFT<double>(
vReal, vImag, SAMPLES, 44100);
// ====== 頻段能量與峰值 ======
float bandValues[BANDS];
float peakValues[BANDS];
int16_t sampleBuf[SAMPLES];
// ====== 顏色工具:HSL 轉 RGB565 ======
uint16_t hslToRgb565(float h, float s, float l) {
float c = (1.0f - fabsf(2.0f * l - 1.0f)) * s;
float x = c * (1.0f - fabsf(fmodf(h / 60.0f, 2.0f) - 1.0f));
float m = l - c / 2.0f;
float r, g, b;
if (h < 60) { r=c; g=x; b=0; }
else if (h < 120) { r=x; g=c; b=0; }
else if (h < 180) { r=0; g=c; b=x; }
else if (h < 240) { r=0; g=x; b=c; }
else if (h < 300) { r=x; g=0; b=c; }
else { r=c; g=0; b=x; }
uint8_t R = (uint8_t)((r + m) * 31);
uint8_t G = (uint8_t)((g + m) * 63);
uint8_t B = (uint8_t)((b + m) * 31);
return (R << 11) | (G << 5) | B;
}
// ====== 步驟 3:初始化麥克風 I2S ======
void setupMicrophone() {
const i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX),
.sample_rate = 44100,
.bits_per_sample = I2S_BITS_PER_SAMPLE_16BIT,
.channel_format = I2S_CHANNEL_FMT_ONLY_LEFT,
.communication_format = I2S_COMM_FORMAT_STAND_I2S,
.intr_alloc_flags = ESP_INTR_FLAG_LEVEL1,
.dma_buf_count = 8,
.dma_buf_len = 64,
.use_apll = false,
.tx_desc_auto_clear = false,
.fixed_mclk = 0
};
const i2s_pin_config_t pin_config = {
.bck_io_num = I2S_SCK,
.ws_io_num = I2S_WS,
.data_out_num = -1,
.data_in_num = I2S_SD
};
i2s_driver_install(I2S_PORT, &i2s_config, 0, NULL);
i2s_set_pin(I2S_PORT, &pin_config);
i2s_start(I2S_PORT);
}
void setup() {
Serial.begin(115200);
// 步驟 4:開啟背光,初始化螢幕
pinMode(TFT_BL, OUTPUT);
digitalWrite(TFT_BL, HIGH);
gfx->begin();
gfx->fillScreen(0x0000);
// 步驟 5:初始化麥克風
setupMicrophone();
memset(peakValues, 0, sizeof(peakValues));
}
// ====== 繪製圓形頻譜 ======
void drawCircularSpectrum() {
int cx = 120, cy = 120;
int innerR = 25;
int maxLen = 85;
float angleStep = 2.0f * PI / BANDS;
float barWidth = angleStep * 0.7f;
gfx->fillScreen(0x0000);
for (int i = 0; i < BANDS; i++) {
float angle = i * angleStep - PI / 2.0f;
float hue = (float)i / BANDS * 360.0f;
float val = bandValues[i];
int barLen = (int)(val * maxLen);
for (int r = innerR; r < innerR + barLen; r += 2) {
float t = (float)(r - innerR) / maxLen;
uint16_t color = hslToRgb565(hue, 1.0f, 0.3f + t * 0.3f);
float x1 = cx + cosf(angle - barWidth/2) * r;
float y1 = cy + sinf(angle - barWidth/2) * r;
float x2 = cx + cosf(angle + barWidth/2) * r;
float y2 = cy + sinf(angle + barWidth/2) * r;
gfx->drawLine(x1, y1, x2, y2, color);
}
if (peakValues[i] > 0.02f) {
int peakR = innerR + (int)(peakValues[i] * maxLen) + 3;
float px = cx + cosf(angle) * peakR;
float py = cy + sinf(angle) * peakR;
gfx->fillCircle(px, py, 2, 0xFFFF);
}
peakValues[i] *= 0.95f;
if (bandValues[i] > peakValues[i]) {
peakValues[i] = bandValues[i];
}
}
}
void loop() {
// 步驟 6:讀取麥克風 I2S 資料
size_t bytes_read = 0;
i2s_read(I2S_PORT, sampleBuf, sizeof(sampleBuf),
&bytes_read, portMAX_DELAY);
// 步驟 7:將取樣資料填入 FFT 實部
for (int i = 0; i < SAMPLES; i++) {
vReal[i] = (double)sampleBuf[i];
vImag[i] = 0.0;
}
// 步驟 8:執行 FFT
FFT.windowing(FFT_WIN_TYP_HAMMING, FFT_FORWARD);
FFT.compute(FFT_FORWARD);
FFT.complexToMagnitude();
// 步驟 9:將 FFT 結果映射到 16 個頻段
memset(bandValues, 0, sizeof(bandValues));
int specLen = SAMPLES / 2;
for (int i = 0; i < BANDS; i++) {
int start = (int)(pow((float)i / BANDS, 1.8f) * specLen * 0.7f);
int end = (int)(pow((float)(i+1) / BANDS, 1.8f) * specLen * 0.7f);
if (end <= start) end = start + 1;
float sum = 0;
for (int j = start; j < end && j < specLen; j++) {
sum += (float)vReal[j];
}
float avg = sum / (end - start);
bandValues[i] = constrain(avg / 5000.0f, 0.0f, 1.0f);
}
// 步驟 10:繪製圓形頻譜
drawCircularSpectrum();
}程式碼說明
① 為什麼 SAMPLES = 512? 512 是 2 的冪次,FFT 演算法在這種長度下效率最高。以 44.1kHz 取樣率為例,512 點 FFT 的頻率解析度約為 86Hz——夠用了。換成 256 更快但頻率細節少,換成 1024 更細膩但更新率會明顯下降。
② 頻段分佈為什麼用 pow(…, 1.8)? 線性分頻段會讓高頻區域的頻段擠滿資料,低頻卻空空如也。指數分法讓低頻頻段更窄(細膩)、高頻頻段更寬(合併噪音),和人耳的頻率感知曲線更接近,看起來更「正常」。
③ 正規化除以 5000 是怎麼來的? 這個值和你的麥克風距離聲源、環境音量都有關係——不同場景需要手動調。如果柱子總是頂到頭(能量截斷),就把 5000 改大;如果柱子太矮幾乎看不見,就改小。
*④ peakValues[i] = 0.95 的作用? 這是「峰值保持 + 緩降」的經典手法:聲音突然停止時,峰值白點不會瞬間消失,而是每幀乘以 0.95 緩緩下落,視覺上更順暢,像專業音頻設備那種效果。
常見問題排查
別慌,90% 的問題出在這幾個地方:
螢幕全黑,什麼都不顯示 先檢查背光(BL 腳位)是否真的拉高了(如果你的模組沒有 BL 腳位可以忽略),再檢查 SPI 四根線(SCK / MOSI / CS / DC)有沒有接錯或接虛。用萬用電表量一下 VCC 是否有 3.3V 輸出。如果背光亮但螢幕全黑,十有八九是 CS 或 DC 接錯了,換過來試試。
頻譜柱一動不動,或者亂跳跟聲音毫無關係 第一件事:確認 INMP441 的 L/R 腳位接了 GND,這是最常踩的坑。懸空的 L/R 會導致聲道選擇異常,採集到的全是隨機雜訊。L/R 接好之後再檢查 SD / WS / SCK 三根線的 GPIO 編號。
頻譜柱全部頂到頭(能量一直最大)
把程式碼裡 bandValues[i] = constrain(avg / 5000.0f, ...) 中的 5000 改大,比如 15000 或 30000。麥克風離聲源太近也會這樣,先把麥克風移遠 30cm 試試。
頻譜柱有反應,但只有少數幾根動 可能是測試用的聲源頻率範圍太窄(比如只用單音哨聲)。換一段全頻段音樂(帶低音、人聲、高頻樂器的),看各頻段是否都有回應。
編譯失敗:ArduinoFFT 模板類別報錯
確認安裝的是 arduinoFFT(kosme 版)v2.x。v1.x 的寫法是 ArduinoFFT FFT(沒有模板參數),v2.x 才是 ArduinoFFT<double>,兩個版本 API 不相容。在函式庫管理員裡直接更新到最新版本即可。
FAQ
Q:INMP441 的 L/R 腳位不接會怎樣? A:聲道選擇懸空,麥克風輸出行為未定義,實測大概率採集到全是雜訊的隨機資料,頻譜柱會亂跳,和聲音完全無關。接 GND = 左聲道,接 3.3V = 右聲道,二選一,不能不接。
Q:SAMPLES 能改成 1024 嗎?會有什麼影響? A:可以改,頻率解析度從約 86Hz 提升到約 43Hz,低頻細節更豐富。代價是每幀採集和計算時間翻倍,更新率會從約 20fps 降到約 10fps。對頻譜視覺化來說 10fps 肉眼仍然可以接受。
Q:只有 3.3V,INMP441 能正常工作嗎? A:完全沒問題。INMP441 支援 1.8V ~ 3.3V 供電,3.3V 是最常見的工作電壓,不需要額外降壓模組。
Q:ESP32-S3 的 CPU 佔用率高嗎,會影響其他任務嗎? A:512 點 FFT 在 ESP32-S3 的 240MHz 主頻下大約佔單核 10%~15% 的 CPU 時間。如果還需要跑 Wi-Fi 或藍牙,建議把 FFT + 繪圖放到 Core 0,網路任務放到 Core 1,兩者互不干擾。
Q:GC9A01 能換成 ST7789 或其他螢幕驅動嗎?
A:可以換。Arduino_GFX_Library 支援幾十種驅動晶片,把程式碼裡的 Arduino_GC9A01 換成對應的類別(如 Arduino_ST7789),修改解析度參數,接線參考新螢幕資料手冊即可。注意非圓形螢幕需要重新計算圓心座標。
Q:頻譜安靜時有「底噪」,柱子不歸零,怎麼辦?
A:INMP441 本身有底噪(SNR 61dBA 意味著總有極少量環境噪音被採入),可以加一個噪音門限:在映射前加一行 if (avg < 200) avg = 0;,安靜時柱子就能完全歸零了。同時把正規化除數適當調大也有幫助。
Q:ESP32-S3 用的是哪個版本的 I2S 驅動?
A:本文使用的是 ESP-IDF v4.x 風格的舊版 I2S 驅動(i2s_driver_install / i2s_read)。ESP-IDF v5.x 引入了新版 I2S API(i2s_new_channel 等),如果你的 ESP32-S3 板支援包升級到了 3.x,需要參考新版 API 對 setupMicrophone() 函式進行改寫。
延伸玩法
- 換成 32 個頻段,搭配更大圓形螢幕(如 2.1 吋 GC9A01A),頻譜更細膩
- 加觸控按鍵切換顯示模式(圓形輻射 / 直向柱形 / 示波器波形)
- 接入 Wi-Fi,把頻譜資料推送到瀏覽器,在網頁裡再渲染一遍
- 用兩塊 INMP441 實現立體聲,左右聲道分別用不同顏色呈現