ESP32-S3 + GC9A01 + MPU6050 數位水平儀完整教學(SPI + I2C + Arduino)
難度:⭐⭐☆☆☆(新手可上手) 預計時間:45 分鐘 測試環境:Arduino IDE 2.3.8 | Arduino_GFX_Library v1.6.5 | MPU6050_light v1.2.1
一句話摘要:ESP32-S3 驅動 GC9A01 圓形 TFT + MPU6050 六軸感測器,做一個即時氣泡水平儀,氣泡顏色隨傾斜角度變化(綠→黃→紅),附完整接線表和 Arduino 程式碼。
TL;DR(快速上手):
- MPU6050 接線:SDA → GPIO 15,SCL → GPIO 16,AD0 → GND(固定 I2C 位址 0x68)
- GC9A01 接線:CLK → GPIO 12,MOSI → GPIO 11,CS → GPIO 9,DC → GPIO 10,RST → GPIO 18,BL → GPIO 7
- 安裝函式庫:
GFX Library for Arduino(作者 moononournation)+MPU6050_light(作者 rfetick)- 燒錄程式碼,上電後保持水平靜置約 1 秒等校準提示消失,然後隨意傾斜看氣泡跑
前言
你有沒有試過徒手安裝一塊層板,覺得「差不多水平了」,放上東西才發現所有東西都在往一邊滑?
我就是這種人。本來是借不到傳統水平儀,想著翻翻零件盒碰碰運氣——結果圓形螢幕 GC9A01 和 MPU6050 都在角落裡吃灰,兩個湊在一起剛好就是一個數位水平儀的全部原料。
更妙的是,圓形螢幕做水平儀在視覺上也天作之合:氣泡置中 = 綠色,偏一點 = 黃色,傾斜過頭 = 紅色,一眼就看懂,不需要任何說明書。
本文目標:從零開始,接線 → 裝函式庫 → 燒程式碼 → 看氣泡動,照著做就能重現。
實驗效果
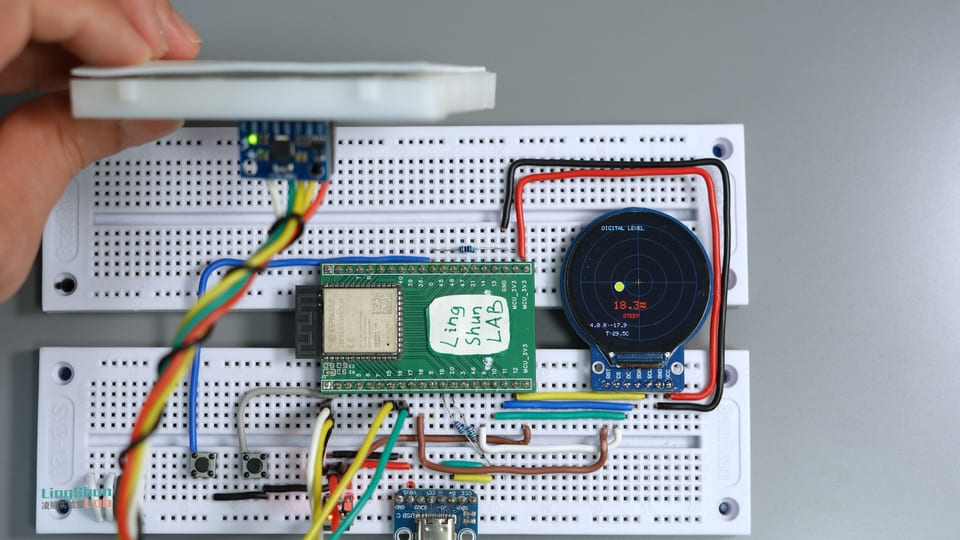
螢幕即時顯示四項內容:
- 中央氣泡:隨裝置傾斜移動,顏色三段指示(綠 = 水平 / 黃 = 輕微傾斜 / 紅 = 明顯傾斜)
- 合成傾斜角(°):Pitch 和 Roll 的合成值,大字顯示
- Pitch / Roll 分項數值:俯仰角與橫滾角各自的讀數
- 晶片溫度:MPU6050 內建溫度感測器的讀數(比室溫偏高屬正常,後文有說明)
元件說明
GC9A01 圓形 TFT 顯示螢幕
把它想像成一塊被專門裁成圓形的手機螢幕——240×240 的解析度不算頂尖,但貼著圓形玻璃放在桌上,做水平儀的錶盤簡直是為它量身打造的。
| 參數 | 數值 |
|---|---|
| 解析度 | 240 × 240 px(圓形顯示區域) |
| 介面 | SPI(最高 80 MHz) |
| 供電 | 3.3V |
| 色深 | 65K 色(RGB565) |
| 面板類型 | IPS |
選它的原因:圓形錶盤天然適配氣泡水平儀造型,SPI 高速介面跑 20fps 動畫完全夠用。
MPU6050 六軸慣性感測器
把它想像成手機陀螺儀和加速度計的合體版——手機自動旋轉螢幕、LINE 計步,用的就是同類晶片。MPU6050 把三軸加速度計(感知傾斜方向)和三軸陀螺儀(感知旋轉速率)塞進同一顆 4mm × 4mm 的小晶片,還順手附贈了一個溫度感測器。
| 參數 | 數值 |
|---|---|
| 加速度量程 | ±2 / ±4 / ±8 / ±16 g(可設定) |
| 陀螺儀量程 | ±250 / ±500 / ±1000 / ±2000 °/s(可設定) |
| ADC 解析度 | 16 位元 |
| 介面 | I2C(最高 400 kHz 快速模式) |
| 供電 | 3.3V(VDD 範圍:2.375 ~ 3.46V) |
| I2C 位址 | 0x68(AD0 = GND)/ 0x69(AD0 = VCC) |
選它的原因:價格極低、函式庫支援完善,MPU6050_light 直接輸出融合角度,不用自己寫卡爾曼濾波。
BOM 表
| 元件 | 型號 / 規格 | 數量 |
|---|---|---|
| 主控開發板 | ESP32-S3 | 1 |
| 圓形 TFT 螢幕 | GC9A01 240×240 IPS | 1 |
| 六軸感測器 | MPU6050 模組 | 1 |
| 導線 | 杜邦線 | 若干 |
元件腳位說明
GC9A01 腳位
| 腳位標註 | 功能 |
|---|---|
| VCC | 3.3V 主供電 |
| GND | 電源地 |
| SCL / CLK | SPI 時脈(SCLK) |
| SDA / MOSI | SPI 主出從入資料 |
| CS | 片選(低電位有效) |
| DC | 資料 / 命令切換 |
| RST | 硬體重置(低電位有效) |
| BL | 背光控制 |
MPU6050 腳位
| 腳位標註 | 功能 |
|---|---|
| VCC | 3.3V 主供電 |
| GND | 電源地 |
| SDA | I2C 資料線 |
| SCL | I2C 時脈線 |
| INT | 中斷輸出(輪詢模式不接) |
| AD0 | I2C 位址選擇(接 GND = 0x68) |
| XDA / XCL | 輔助 I2C 介面(本專案不接) |
接線方式
建議按下表逐行接完,每接一根在旁邊打個勾,能省 80% 的除錯時間。
MPU6050 → ESP32-S3
| MPU6050 腳位 | ESP32-S3 腳位 | 說明 |
|---|---|---|
| VCC | 3.3V | 主供電 |
| GND | GND | 共地 |
| SDA | GPIO 15 | I2C 資料線 |
| SCL | GPIO 16 | I2C 時脈線 |
| AD0 | GND | 固定 I2C 位址為 0x68 |
| INT / XDA / XCL | 不接 | 本專案不需要 |
關於 I2C 上拉電阻:標準做法是在 SDA 和 SCL 各接一顆 4.7kΩ 上拉電阻到 3.3V,能明顯提升高速讀取的抗干擾穩定性。本範例省略了這一步,但如果你要做成成品,建議加上。
GC9A01 → ESP32-S3
| GC9A01 腳位 | ESP32-S3 腳位 | 說明 |
|---|---|---|
| VCC | 3.3V | 主供電 |
| GND | GND | 共地 |
| SCL / CLK | GPIO 12 | SPI 時脈 |
| SDA / MOSI | GPIO 11 | SPI 資料 |
| CS | GPIO 9 | 片選 |
| DC | GPIO 10 | 資料 / 命令切換 |
| RST | GPIO 18 | 硬體重置 |
| BL | GPIO 7 | 背光(可選,有些模組沒有這個腳位。程式控制高低電位,或直接接 3.3V 常亮) |
需要安裝的函式庫
在 Arduino IDE 選單 工具 → 管理函式庫 裡搜尋並安裝:
| 函式庫名稱 | 作者 | 測試通過版本 |
|---|---|---|
| GFX Library for Arduino | moononournation | v1.6.5 |
| MPU6050_light | rfetick | v1.2.1 |
版本不一致可能導致 API 變動,建議安裝表中版本。安裝完後重新啟動 Arduino IDE,再開專案。
完整程式碼
/**
* ESP32-S3 + GC9A01 + MPU6050 數位水平儀
* Digital Spirit Level
*
* 接線:
* GC9A01 → SCL=12, SDA=11, CS=9, DC=10, RST=18, BL=7
* MPU6050 → SDA=15, SCL=16, AD0=GND(I2C 位址 0x68)
*/
#include <Arduino_GFX_Library.h>
#include <Wire.h>
#include <MPU6050_light.h>
// ---- 顏色定義(RGB565 格式)----
#define COLOR_BG 0x0863 // 深色背景
#define COLOR_GRID 0x1A69 // 刻度網格線
#define COLOR_GREEN 0x07E6 // 氣泡置中 → 綠色
#define COLOR_YELLOW 0xFEA0 // 輕微傾斜 → 黃色
#define COLOR_RED 0xF820 // 傾斜過大 → 紅色
#define COLOR_TEXT 0xC618 // 普通文字
#define COLOR_ACCENT 0xFD20 // 中心十字線
// ---- GC9A01 SPI 腳位 ----
#define TFT_SCK 12
#define TFT_SDA 11
#define TFT_CS 9
#define TFT_DC 10
#define TFT_RST 18
#define TFT_BL 7
// ---- MPU6050 I2C 腳位(務必與接線表一致)----
#define MPU_SDA 15 // SDA → GPIO 15
#define MPU_SCL 16 // SCL → GPIO 16
// ---- 初始化顯示驅動 ----
// 第一步:建立 SPI 匯流排,參數順序:DC, CS, SCK, MOSI, MISO
Arduino_DataBus *bus = new Arduino_ESP32SPI(
TFT_DC, TFT_CS, TFT_SCK, TFT_SDA,
GFX_NOT_DEFINED
);
// 第二步:建立 GC9A01 螢幕物件(rotation=0,IPS 面板=true)
Arduino_GFX *gfx = new Arduino_GC9A01(
bus, TFT_RST, 0, true
);
// 第三步:建立 240×240 離屏 Canvas(雙緩衝,防畫面撕裂)
Arduino_Canvas *canvas = new Arduino_Canvas(
240, 240, gfx
);
// ---- MPU6050 ----
MPU6050 mpu(Wire);
// ---- 畫面更新率控制 ----
const int16_t cx = 120, cy = 120; // 螢幕圓心座標(像素)
unsigned long lastFrame = 0;
const int frameDelay = 1000 / 20; // 目標畫面更新率:20fps → 每幀 50ms
// ---- 函式前向宣告 ----
void drawGrid();
void drawBubble(float pitch, float roll);
void drawReadouts(float pitch, float roll, float temp);
// =============================================================
void setup() {
Serial.begin(115200);
delay(500);
Serial.println("=== ESP32-S3 數位水平儀 啟動中 ===");
// 第一步:初始化螢幕和背光
gfx->begin();
pinMode(TFT_BL, OUTPUT);
digitalWrite(TFT_BL, HIGH); // 開啟背光
canvas->begin();
Serial.println("[OK] 螢幕初始化完成");
// 第二步:初始化 I2C,掃描匯流排(方便除錯時確認接線)
Wire.begin(MPU_SDA, MPU_SCL);
Serial.print("[DBG] 掃描 I2C 匯流排 SDA=");
Serial.print(MPU_SDA);
Serial.print(" SCL=");
Serial.println(MPU_SCL);
byte found = 0;
for (byte addr = 1; addr < 127; addr++) {
Wire.beginTransmission(addr);
if (Wire.endTransmission() == 0) {
Serial.print(" 找到 I2C 裝置,位址:0x");
Serial.println(addr, HEX);
found++;
}
}
if (found == 0) {
Serial.println("[ERROR] 未找到任何 I2C 裝置!請檢查接線。");
}
// 第三步:初始化 MPU6050
byte status = mpu.begin();
if (status == 0) {
Serial.println("[OK] MPU6050 連線成功");
} else {
Serial.println("[ERROR] MPU6050 未回應!檢查接線或 I2C 位址。");
}
// 第四步:陀螺儀自動校準(執行期間保持裝置水平靜置約 1 秒)
Serial.println("[DBG] 校準中,請保持裝置水平,不要移動...");
canvas->fillScreen(COLOR_BG);
canvas->setTextColor(COLOR_TEXT);
canvas->setTextSize(1);
canvas->setCursor(60, 110);
canvas->print("Calibrating...");
canvas->setCursor(55, 125);
canvas->print("Keep device flat");
canvas->flush();
delay(1000);
mpu.calcOffsets(); // 自動計算加速度計和陀螺儀的零偏
Serial.print("[DBG] 加速度偏移: ");
Serial.print(mpu.getAccXoffset()); Serial.print(", ");
Serial.print(mpu.getAccYoffset()); Serial.print(", ");
Serial.println(mpu.getAccZoffset());
Serial.print("[DBG] 陀螺儀偏移: ");
Serial.print(mpu.getGyroXoffset()); Serial.print(", ");
Serial.print(mpu.getGyroYoffset()); Serial.print(", ");
Serial.println(mpu.getGyroZoffset());
Serial.println("[OK] 校準完成,開始執行!");
}
// =============================================================
static int logCnt = 0; // 除錯日誌節流計數器
void loop() {
unsigned long now = millis();
if (now - lastFrame < frameDelay) return; // 畫面更新率節流
lastFrame = now;
// 第一步:讀取感測器
mpu.update();
float pitch = mpu.getAngleY(); // 俯仰角(前後傾斜)
float roll = -mpu.getAngleX(); // 橫滾角(左右傾斜,取反對齊視覺方向)
float temp = mpu.getTemp(); // 晶片溫度(比環境溫度偏高屬正常)
// 除錯日誌:每 20 幀(約 1 秒)印一次,不影響畫面更新率
if (++logCnt >= 20) {
logCnt = 0;
Serial.print("[DBG] pitch="); Serial.print(pitch, 2);
Serial.print(" roll="); Serial.print(roll, 2);
Serial.print(" temp="); Serial.print(temp, 1);
Serial.print(" | accX="); Serial.print(mpu.getAccX(), 2);
Serial.print(" accY="); Serial.print(mpu.getAccY(), 2);
Serial.print(" accZ="); Serial.println(mpu.getAccZ(), 2);
}
// 第二步:限幅——超過 ±45° 時氣泡貼邊顯示,不會跑出圓圈
pitch = constrain(pitch, -45.0f, 45.0f);
roll = constrain(roll, -45.0f, 45.0f);
// 第三步:繪製當前幀
canvas->fillScreen(COLOR_BG); // 清空畫布
drawGrid(); // 刻度網格
drawBubble(pitch, roll); // 氣泡
drawReadouts(pitch, roll, temp); // 數值文字
canvas->flush(); // 推送到螢幕
}
// =============================================================
// 繪製背景刻度圈和中心十字準星
void drawGrid() {
canvas->drawCircle(cx, cy, 25, COLOR_GRID);
canvas->drawCircle(cx, cy, 50, COLOR_GRID);
canvas->drawCircle(cx, cy, 80, COLOR_GRID);
canvas->drawCircle(cx, cy, 105, COLOR_GRID);
canvas->drawFastHLine(15, cy, 210, COLOR_GRID);
canvas->drawFastVLine(cx, 15, 210, COLOR_GRID);
// 中心十字準星(使用強調色,比網格更顯眼)
canvas->drawFastHLine(cx - 5, cy, 10, COLOR_ACCENT);
canvas->drawFastVLine(cx, cy - 5, 10, COLOR_ACCENT);
}
// 根據 pitch/roll 角度映射氣泡位置,並按距離著色
void drawBubble(float pitch, float roll) {
// ±45° 線性映射到 ±90px 偏移
int16_t bx = cx + (int16_t)(roll / 45.0f * 90.0f);
int16_t by = cy + (int16_t)(pitch / 45.0f * 90.0f);
// 計算氣泡與中心的像素距離,決定顏色等級
float dist = sqrt((float)((bx - cx) * (bx - cx) + (by - cy) * (by - cy)));
uint16_t color;
if (dist < 10) color = COLOR_GREEN; // ≈ ±5° 內:水平
else if (dist < 40) color = COLOR_YELLOW; // ≈ ±20° 內:輕微傾斜
else color = COLOR_RED; // 超過 ±20°:明顯傾斜
// 中心到氣泡的連線 + 實心氣泡 + 白色描邊
canvas->drawLine(cx, cy, bx, by, COLOR_GRID);
canvas->fillCircle(bx, by, 8, color);
canvas->drawCircle(bx, by, 8, 0xFFFF);
}
// 繪製角度數值、狀態文字和溫度
void drawReadouts(float pitch, float roll, float temp) {
float total = sqrt(pitch * pitch + roll * roll); // 合成傾斜角
canvas->setTextSize(1);
canvas->setTextColor(COLOR_TEXT);
// 頂部標題
canvas->setCursor(55, 18);
canvas->print("DIGITAL LEVEL");
// 合成角度:大字體,顏色與氣泡同步
canvas->setTextSize(2);
uint16_t color;
if (total < 1) color = COLOR_GREEN;
else if (total < 10) color = COLOR_YELLOW;
else color = COLOR_RED;
canvas->setTextColor(color);
canvas->setCursor(75, 155);
canvas->print(total, 1);
canvas->print((char)247); // ° 符號(ASCII 247)
// 狀態文字
canvas->setTextSize(1);
canvas->setCursor(80, 178);
if (total < 1) canvas->print(" LEVEL");
else if (total < 10) canvas->print(" TILTED");
else canvas->print(" STEEP");
// Pitch / Roll 分項讀數
canvas->setTextColor(COLOR_TEXT);
canvas->setCursor(20, 195);
canvas->print("P:"); canvas->print(pitch, 1);
canvas->print(" R:"); canvas->print(roll, 1);
// 溫度(晶片接面溫度,比室溫偏高屬正常現象)
canvas->setCursor(60, 210);
canvas->print("T:"); canvas->print(temp, 1);
canvas->print("C");
}程式碼說明
初始化流程(setup)
setup 裡按順序走四步:螢幕初始化 → I2C 掃描 → MPU6050 初始化 → 陀螺儀校準。這個時候,你的模組怎麼擺放,中心點就會設定在那個位置。
螢幕用 Arduino_Canvas 做離屏雙緩衝——所有繪製先在記憶體裡完成,最後一次性 flush() 推到螢幕,畫面不會出現撕裂或中間幀。
I2C 掃描那一段會在序列埠印出找到的裝置位址,上電第一次除錯時可以先開啟序列埠監視器確認 MPU6050 有沒有接通(正常應該印出 Found I2C device at 0x68)。
mpu.calcOffsets() 是自動校準,執行約 1 秒,期間需要保持裝置水平靜置。每次上電都會重新校準,所以每次開機先放平,等螢幕提示消失再使用。
主迴圈(loop)
畫面更新率鎖定在 20fps,每幀做四件事:讀感測器 → 限幅 → 繪製 → 推送螢幕。
roll = -mpu.getAngleX() 前面加了負號——目的是讓螢幕氣泡的移動方向和實際傾斜方向保持一致,不取反的話氣泡會往反方向跑。如果你的安裝方向不同,可以自行調整正負號。
氣泡顏色三段判斷:距圓心 <10px 綠色,<40px 黃色,其餘紅色,大約對應 ±5° 以內、±20° 以內、超過 ±20°。
常見問題排除
別慌,90% 的問題就出在接線和位址這幾個地方:
螢幕全白 / 全黑,沒有任何顯示
先確認 VCC 是否接的 3.3V 而不是 5V(GC9A01 不耐壓),BL 背光腳位是否已接通。再檢查 CS、DC、RST 三條線有沒有接錯——CS 接錯螢幕不回應,RST 懸空會卡在重置狀態。可以先把 BL 直接接 3.3V 常亮,如果螢幕亮白,說明螢幕沒問題,是 SPI 初始化失敗。
序列埠印出 [ERROR] 未找到任何 I2C 裝置
用三用電表量一下 MPU6050 的 VCC 腳位有沒有 3.3V。再確認 SDA 和 SCL 沒有接反(SDA → GPIO 15,SCL → GPIO 16)。AD0 必須明確接 GND,懸空狀態下部分模組位址不穩定,I2C 匯流排會不應答。
氣泡持續亂抖,無法穩定下來
上電校準時裝置沒有完全靜置。重新上電,放在平整桌面上,等待螢幕上的校準提示消失後再使用。如果桌面本身在振動(旁邊有印表機、風扇),換個位置。
Pitch 或 Roll 方向反了
根據開發板的安裝方向,在程式碼裡調整對應角度前面的正負號:pitch = mpu.getAngleY() 改為 pitch = -mpu.getAngleY(),或者調整 roll 那行,調到方向正確為止。
溫度比室溫高出十幾度
正常現象。MPU6050 測的是晶片接面溫度,比環境溫度高 10~20°C 很常見,僅供參考。如果需要精確環境溫度,接一顆獨立感測器(如 DS18B20)。
畫面閃爍或有撕裂感
程式碼已啟用 Arduino_Canvas 雙緩衝,正常情況下不撕裂。如果依然有問題,檢查 SPI 杜邦線是否鬆動,線材不要超過 20cm,必要時在電源腳位附近加 100nF 去耦電容。
FAQ
Q:MPU6050 的角度更新頻率是多少?
A:MPU6050_light 以 I2C 400kHz 快速模式讀取,原始資料取樣率最高 1kHz。本程式碼畫面更新率限定 20fps,實際更新 20Hz。如果需要更高更新率,把 frameDelay 改為更小的值,實測 40fps 以內比較穩定(受 SPI 推送螢幕速度限制)。
Q:腳位可以換其他的 GPIO 嗎?
A:可以,修改程式碼頂部的 #define 巨集即可。GC9A01 的 SPI 腳位建議選 ESP32-S3 硬體 SPI(GPIO 11 / 12 是 SPI2,效能最佳);MPU6050 的 I2C 腳位任意 GPIO 均可,只需程式碼和接線保持一致。
Q:GC9A01 能換成方形螢幕嗎?
A:可以。把 Arduino_GC9A01 替換成對應驅動類(例如 ST7789 用 Arduino_ST7789),修改 Arduino_Canvas 的寬高和圓心座標 cx/cy 即可,繪製邏輯不用動。
Q:ESP32-S3 的 3.3V 同時帶 GC9A01 和 MPU6050 夠用嗎? A:夠用。GC9A01 背光電流約 20mA,MPU6050 典型功耗 3.5mW(約 1mA),合計遠低於開發板 3.3V 腳位通常 300~500mA 的限流。
Q:能在同一條 I2C 匯流排上掛兩個 MPU6050 嗎?
A:可以。一個 AD0 接 GND(位址 0x68),另一個 AD0 接 VCC(位址 0x69),共用同一組 SDA/SCL。程式碼裡宣告兩個 MPU6050 物件並分別傳入不同位址初始化即可。
Q:每次斷電重啟都要重新校準嗎?
A:是的,本程式碼每次上電都在 setup() 裡呼叫 mpu.calcOffsets() 做一次動態校準。如果你的使用場景是固定安裝,可以把偏移量存到 EEPROM,下次上電直接讀取,省去校準等待時間。
延伸玩法
- 接按鍵切換顯示模式(水平儀 / 即時角度曲線 / 溫度計)
- 把校準基準值存入 EEPROM,補償固定安裝面的偏角
- 接無源蜂鳴器,水平時發出提示音
- 換一套圓形錶盤面板,做成磁力羅盤或 G-Force 顯示器