ESP32-S3 + GC9A01 + HMC5883L 圆屏指南针翻车全记录——能做、好看,但这精度你懂的(完整教程)
难度:⭐⭐⭐☆☆(有一点基础可上手) 预计时间:45 分钟 测试环境:Arduino IDE 2.3.8 · Arduino_GFX_Library v1.6.5 · Adafruit_HMC5883_U v1.2.4
⚠️ 先说结论: 这套方案做出来的指南针看着很炫,大方向对得上,但精度典型在 ±5°~±15°,受周围磁场影响大。拿来学习驱动流程、做演示、当桌面摆件——完全够用。用于户外导航、无人机定向、任何精度要求严格的场合——不推荐,后面会说为什么。
TL;DR(快速上手):
- 先跑 I2C 扫描确认芯片地址——
0x0D是 QMC5883L(仿制),0x1E才是真 HMC5883L,按型号装对应的库,否则读数全是乱码- 按接线表连好 12 根线(屏 8 根 + 传感器 4 根,3.3V/GND 可共用)
- 把
DECLINATION_DEG改成你所在城市的磁偏角(北京约 -6.5°,东京约 -7.5°,查询链接见文末)- 上电时按住 BOOT 键(GPIO0)进入 15 秒旋转校准,水平慢转一圈
- 松手后校准数据自动存入 NVS,掉电不丢,下次直接开用
前言
买这块 GC9A01 圆屏的时候,我盯着它看了一会儿——1.28 寸,240×240,完美的正圆。这不就是天生的罗盘表盘吗?
然后我花了一个周末把它做出来,打开手机一比对……好吧,指针大方向是对的,就是稍微偏了一点点,大概十来度的样子。转多2圈,发觉不转了。掉电再上电,还是不怎么转了。。。
“肯定是没校准好。” 我重新校准,换了个地方测,对着 iPhone 转圈圈——差距依然在那里,不是代码写错了,是这个传感器模块的先天局限。可以观察到手机靠近,也会影响到它。
所以这篇文章有两个目的:第一,把圆屏指南针完整做出来,代码能跑,校准能过,效果确实好看;第二,把它的精度局限讲清楚,让你在动手前就知道”翻车在哪”——而不是做完了才发现指针对不上 Google Maps。
如果你想学 GC9A01 + HMC5883L 的驱动方法,或者做一个酷炫的桌面摆件,这个项目完全值得做。如果你的目标是”导航精度”,建议直接跳到文章后面的”适不适合正式项目”那一节,再决定要不要继续。
实验效果
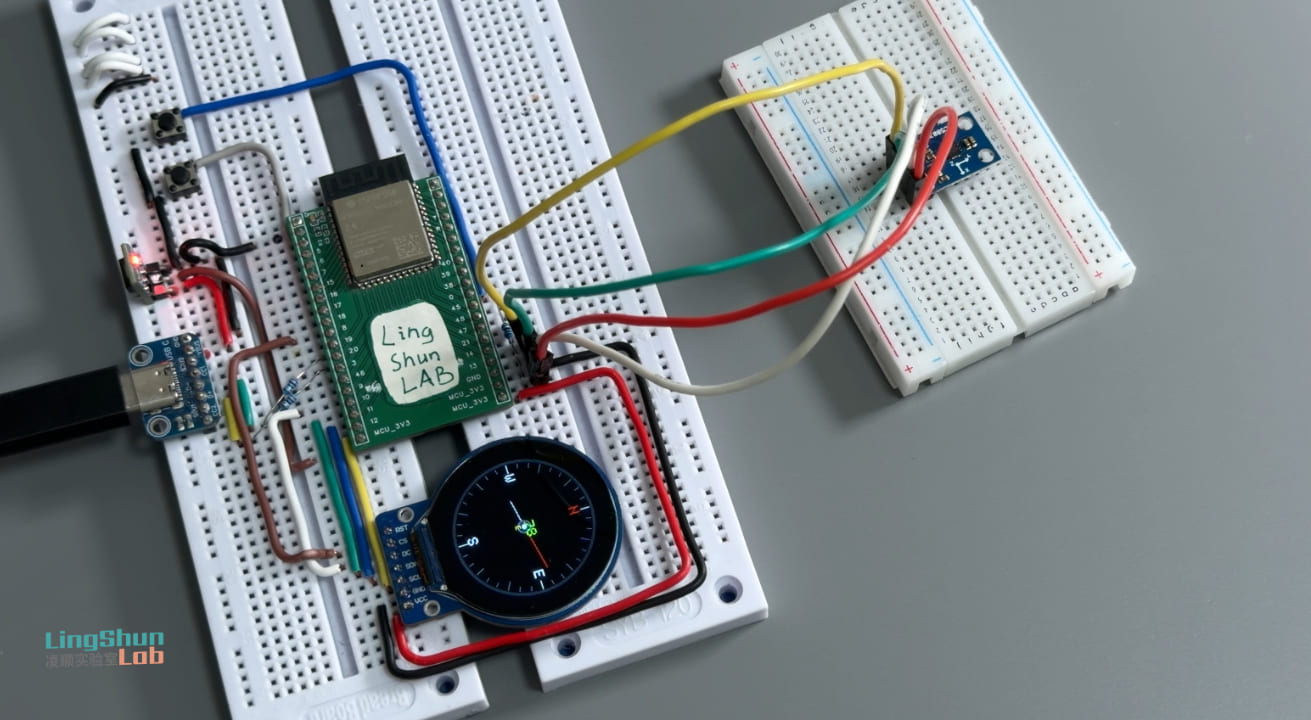
GC9A01 圆屏上实时显示指南针表盘:红色指针指北,中央绿色数字显示当前方位角(0°~359°),黄色字母标注最近的八方位(N / NE / E / SE / S / SW / W / NW)。上电时按住 BOOT 键进入 15 秒旋转校准模式,屏幕显示进度条和实时磁场范围;校准完成后指针运动平滑、约 25fps,不会像未校准时那样乱抖。
关于精度,先说清楚: 校准过的 HMC5883L 在理想环境(远离金属和其他磁场源)下,方位角误差约 ±5°。靠近电脑主机、充电器、音箱或螺丝刀时,误差轻松涨到 ±15° 以上。日常桌面使用”大方向没错”,但是我买的这个模块不知道是不是正品,有时候是会抽风不动,精确到十位数就不要指望了。这是硬件的先天局限,不是代码的问题,后面的”适不适合正式项目”一节会详细解释。
元件说明
GC9A01 圆形 TFT 屏
想象一块直径 3.2 厘米的圆形手表屏——GC9A01 就是这个,SPI 接口,分辨率 240×240,驱动内置在屏幕控制器里,ESP32 直接推像素就行,不需要外置 RAM。之所以选它,一是圆形天生适合罗盘 UI,二是 Arduino_GFX_Library 有完整支持,驱动代码几行搞定。
| 参数 | 规格 |
|---|---|
| 分辨率 | 240 × 240 px |
| 接口 | SPI(最高 80 MHz) |
| 供电 | 3.3V |
| 背光控制 | 高电平点亮 |
| 典型功耗 | 约 20 mA(全亮) |
GC9A01 屏幕模块(8 个引脚)
| 引脚标注 | 功能 |
|---|---|
| VCC | 3.3V 供电 |
| GND | 地 |
| SCL / CLK | SPI 时钟 |
| SDA / MOSI | SPI 数据(主→从) |
| CS | 片选,低有效 |
| DC | 数据/命令选择 |
| RST | 硬件复位,低有效 |
| BL | 背光控制,高电平点亮 |
HMC5883L / QMC5883L 三轴磁力计
磁力计是指南针的”鼻子”,负责感知地球磁场在 X/Y/Z 三个方向的强度,然后用反三角函数算出你面朝哪个方向。I2C 接口,3.3V 供电,读取一次数据只需几毫秒。
需要特别说明:市面上绝大多数标着”HMC5883L”的模块,实际芯片是 QST 公司的 QMC5883L——两者引脚兼容,但寄存器完全不同,对应的驱动库也不一样。先别急着装库,按下文的 I2C 扫描步骤确认你手上是哪个芯片,再装对应的库,能省去大半排查时间。
| 参数 | HMC5883L(原版) | QMC5883L(仿制) |
|---|---|---|
| I2C 地址 | 0x1E | 0x0D |
| 量程 | ±8 Gauss | ±8 Gauss |
| 分辨率 | 2 mGauss | 2 mGauss |
| 噪声密度 | ~2 mGauss/√Hz | ~2 mGauss/√Hz |
HMC5883L / QMC5883L 磁力计模块(4 个常用引脚)
| 引脚标注 | 功能 |
|---|---|
| VCC | 3.3V 供电 |
| GND | 地 |
| SDA | I2C 数据 |
| SCL | I2C 时钟 |
| DRDY | 数据就绪中断(本项目不用,不接也行) |
两者基础性能相近,用于实验演示都没问题。但需要说清楚的是:无论哪款芯片,这个价位的磁力计模块都没有片上温漂补偿,也没有传感器融合,只做了最基础的二维磁场测量——这决定了它的精度上限,也决定了它只适合做演示和学习,不适合实际导航应用。
BOM 表
| 元件 | 型号 / 规格 | 数量 | 参考价 |
|---|---|---|---|
| 主控开发板 | ESP32-S3(任意开发板) | 1 | ¥25~40 |
| 圆形 TFT 屏 | GC9A01,1.28 寸,240×240 | 1 | ¥12~20 |
| 磁力计模块 | HMC5883L 或 QMC5883L | 1 | ¥3~8 |
| 杜邦线 | 公对母,20cm | 若干 | ¥3 |
接线方式
建议接完之后对着表格逐根核对一遍,这一步能省掉 80% 的”为什么没反应”排查时间。
GC9A01 圆屏 → ESP32-S3
| 屏幕引脚 | ESP32-S3 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SCL / CLK | GPIO12 |
| SDA / MOSI | GPIO11 |
| CS | GPIO9 |
| DC | GPIO10 |
| RST | GPIO18 |
| BL | GPIO7(或直接接 3.3V 常亮) |
HMC5883L / QMC5883L → ESP32-S3
| 传感器引脚 | ESP32-S3 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SDA | GPIO14 |
| SCL | GPIO13 |
需要安装的库
安装前先做一件事——确认你的磁力计芯片型号。上传下面这段代码,打开串口监视器(115200),看打印的 I2C 地址:
#include <Wire.h>
void setup() {
Serial.begin(115200);
Wire.begin(13, 14); // SDA=13, SCL=14,和本项目一致
Serial.println("Scanning I2C...");
for (uint8_t addr = 1; addr < 127; addr++) {
Wire.beginTransmission(addr);
if (Wire.endTransmission() == 0) {
Serial.printf("Found device at 0x%02X\n", addr);
}
}
Serial.println("Done.");
}
void loop() {}- 打印
0x1E→ 是真 HMC5883L,装 Adafruit HMC5883 Unified(作者 Adafruit) - 打印
0x0D→ 是 QMC5883L,需要把代码里的#include和传感器对象换成对应的库(见常见问题第 3 条)
确认芯片后,打开 Arduino IDE → 库管理器,搜索安装:
| 库名 | 适用芯片 | 测试通过版本 |
|---|---|---|
| Arduino_GFX_Library | — | v1.6.5 |
| Adafruit HMC5883 Unified | HMC5883L(0x1E) | v1.2.4 |
| Adafruit Unified Sensor | 两者都需要 | v1.1.15 |
如果你是 QMC5883L(0x0D),后面常见问题里有替换方案。
完整代码
#include <Arduino_GFX_Library.h>
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HMC5883_U.h>
#include <Preferences.h>
#include <math.h>
// ─── 第一步:引脚定义 ────────────────────────────────
#define TFT_SCK 12
#define TFT_MOSI 11
#define TFT_CS 9
#define TFT_DC 10
#define TFT_RST 18
#define TFT_BL 7
#define I2C_SDA 14
#define I2C_SCL 13
// 上电时按住此键进入校准模式(BOOT 键,GPIO0,不用另外接按钮)
#define CAL_BTN 0
// 磁偏角(偏西为负)—— 查询工具:https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml
// 北京 ≈ -6.5°,上海 ≈ -5.5°,广州 ≈ -3°,东京 ≈ -7.5°
// 不改这个值,指南针整体会偏 X 度,所有方向都错
#define DECLINATION_DEG (-3.0f)
// ─── 第二步:显示对象初始化 ────────────────────────────────
Arduino_DataBus *bus = new Arduino_ESP32SPI(TFT_DC, TFT_CS, TFT_SCK, TFT_MOSI, -1);
Arduino_GC9A01 *gfx = new Arduino_GC9A01(bus, TFT_RST, 0, true);
// Canvas 双缓冲:先在内存里画好整帧,再一次性推送到屏幕,解决闪烁问题
// 内存占用:240×240×2 = 115 KB(ESP32-S3 的 PSRAM 或内部 SRAM 均够用)
Arduino_Canvas *canvas = new Arduino_Canvas(240, 240, gfx, 0, 0);
// ─── 传感器对象 ──────────────────────────────────
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
// ─── 校准参数(硬铁偏移 + 软铁缩放,存在 NVS 里)───────────────────
Preferences prefs;
float calOffX = 0, calOffY = 0;
float calSclX = 1, calSclY = 1;
// ─── EMA 低通滤波参数 ────────────────────────────
float gSmooth = 0;
bool gFirstRead = true;
// alpha 越小越平滑(但响应越慢);桌面摆放用 0.15,手持移动可调到 0.25
#define EMA_ALPHA 0.15f
// ─── 颜色定义(RGB565 格式)────────────────────────────────
#define C_BG 0x0000 // 黑色背景
#define C_RING 0x4208 // 深灰外环
#define C_TICK 0x7BEF // 灰色小刻度
#define C_MAJOR 0xFFFF // 白色主刻度 / 标签
#define C_NORTH 0xF800 // 红色 N
#define C_NDL_N 0xF800 // 红针(北端)
#define C_NDL_S 0xCE79 // 银色针(南端)
#define C_DEG 0x07E0 // 绿色度数
#define C_DIR 0xFFE0 // 黄色方向字母
const char* kDir[] = {"N","NE","E","SE","S","SW","W","NW"};
#define CX 120 // 圆心 X
#define CY 120 // 圆心 Y
#define R 100 // 表盘半径
// ─────────────────────────────────────────────
// 读取方位角(含硬铁/软铁校准修正)
// ─────────────────────────────────────────────
float readHeading() {
sensors_event_t ev;
mag.getEvent(&ev);
// 减去硬铁偏移,消除周围固定磁场(螺丝、铜柱等)的干扰
float x = ev.magnetic.x - calOffX;
float y = ev.magnetic.y - calOffY;
// 软铁归一化:把椭圆形的磁场响应映射回圆形
if (calSclX > 0.01f) x /= calSclX;
if (calSclY > 0.01f) y /= calSclY;
float h = atan2f(y, x) + DECLINATION_DEG * (float)M_PI / 180.0f;
if (h < 0) h += 2.0f * (float)M_PI;
if (h > 2.0f*(float)M_PI) h -= 2.0f * (float)M_PI;
return h * 180.0f / (float)M_PI;
}
// ─────────────────────────────────────────────
// EMA 低通滤波(正确处理 0°/360° 环绕跳变)
// ─────────────────────────────────────────────
float emaFilter(float newAngle) {
if (gFirstRead) { gFirstRead = false; return newAngle; }
float d = newAngle - gSmooth;
if (d > 180.0f) d -= 360.0f; // 比如从 359° 跳到 1°,差值应该是 +2°,而不是 -358°
if (d < -180.0f) d += 360.0f;
float r = gSmooth + d * EMA_ALPHA;
if (r < 0.0f) r += 360.0f;
if (r >= 360.0f) r -= 360.0f;
return r;
}
// ─────────────────────────────────────────────
// 全帧渲染(画完整帧再推屏,杜绝闪烁)
// ─────────────────────────────────────────────
void drawFrame(float angle) {
canvas->fillScreen(C_BG);
// 外环(4 像素宽,给表盘加一个边框感)
for (int r = R; r > R - 4; r--)
canvas->drawCircle(CX, CY, r, C_RING);
// 刻度线:每 10° 一根,每 30° 加长,每 90° 用白色
for (int deg = 0; deg < 360; deg += 10) {
float rad = deg * (float)M_PI / 180.0f;
int len = (deg % 30 == 0) ? 12 : 6;
canvas->drawLine(
CX + (int)(cosf(rad) * (R - 5)), CY + (int)(sinf(rad) * (R - 5)),
CX + (int)(cosf(rad) * (R-5-len)), CY + (int)(sinf(rad) * (R-5-len)),
(deg % 90 == 0) ? C_MAJOR : C_TICK
);
}
// N/E/S/W 标签,N 用红色醒目
canvas->setTextSize(2);
canvas->setTextColor(C_NORTH); canvas->setCursor(CX-6, CY-R+20); canvas->print("N");
canvas->setTextColor(C_MAJOR); canvas->setCursor(CX+R-32, CY-7); canvas->print("E");
canvas->setCursor(CX-6, CY+R-32); canvas->print("S");
canvas->setCursor(CX-R+20, CY-7); canvas->print("W");
// 指针(3 像素宽,视觉更清晰)
float rad = angle * (float)M_PI / 180.0f;
float perp = rad + (float)M_PI / 2.0f;
int pdx = (int)roundf(cosf(perp));
int pdy = (int)roundf(sinf(perp));
int nx = CX + (int)(sinf(rad) * 68); // 红针(指北端)
int ny = CY - (int)(cosf(rad) * 68);
int sx = CX - (int)(sinf(rad) * 42); // 银针(指南端,短一点)
int sy = CY + (int)(cosf(rad) * 42);
for (int d = -1; d <= 1; d++) {
canvas->drawLine(CX+pdx*d, CY+pdy*d, nx+pdx*d, ny+pdy*d, C_NDL_N);
canvas->drawLine(CX+pdx*d, CY+pdy*d, sx+pdx*d, sy+pdy*d, C_NDL_S);
}
// 中心轴小圆(装饰用)
canvas->fillCircle(CX, CY, 9, C_RING);
canvas->drawCircle(CX, CY, 9, 0xA534);
canvas->fillCircle(CX, CY, 3, C_MAJOR);
// 中央显示度数(绿色)和八方位字母(黄色)
canvas->setTextSize(2);
canvas->setTextColor(C_DEG);
char buf[8]; sprintf(buf, "%3d", (int)angle);
canvas->setCursor(CX - 18, CY - 14); canvas->print(buf);
int idx = ((int)(angle + 22.5f) % 360) / 45;
int w = strlen(kDir[idx]) * 6;
canvas->setTextSize(1);
canvas->setTextColor(C_DIR);
canvas->setCursor(CX - w/2, CY + 6); canvas->print(kDir[idx]);
canvas->flush(); // ← 整帧一次性推送到屏幕,这一行是解决闪烁的关键
}
// ─────────────────────────────────────────────
// 15 秒旋转校准
// 原理:记录传感器在各方向的最大/最小值,
// 算出硬铁偏移(offset)和软铁缩放(scale)
// ─────────────────────────────────────────────
void runCalibration() {
float minX = 1e6f, maxX = -1e6f;
float minY = 1e6f, maxY = -1e6f;
const uint32_t DUR = 15000;
uint32_t t0 = millis();
while (millis() - t0 < DUR) {
sensors_event_t ev; mag.getEvent(&ev);
if (ev.magnetic.x < minX) minX = ev.magnetic.x;
if (ev.magnetic.x > maxX) maxX = ev.magnetic.x;
if (ev.magnetic.y < minY) minY = ev.magnetic.y;
if (ev.magnetic.y > maxY) maxY = ev.magnetic.y;
// 实时显示校准进度画面
canvas->fillScreen(C_BG);
canvas->setTextColor(C_DIR); canvas->setTextSize(2);
canvas->setCursor(15, 60); canvas->print("CALIBRATING");
canvas->setTextColor(C_MAJOR); canvas->setTextSize(1);
canvas->setCursor(8, 95); canvas->print("Slowly rotate 360 deg");
canvas->setCursor(18, 109); canvas->print("Keep device level");
// 进度条
int p = (millis() - t0) * (R*2-2) / DUR;
canvas->drawRect(20, 130, R*2, 14, C_MAJOR);
canvas->fillRect(21, 131, p, 12, 0x07E0);
// 实时显示磁场范围(帮助确认是否转满了一圈)
char b[44];
canvas->setTextColor(0x7BEF);
sprintf(b, "X[%.1f ~ %.1f]", minX, maxX);
canvas->setCursor(8, 157); canvas->print(b);
sprintf(b, "Y[%.1f ~ %.1f]", minY, maxY);
canvas->setCursor(8, 170); canvas->print(b);
canvas->flush();
delay(50);
}
// 计算偏移和缩放
calOffX = (maxX + minX) / 2.0f;
calOffY = (maxY + minY) / 2.0f;
calSclX = (maxX - minX) / 2.0f; if (calSclX < 0.01f) calSclX = 1.0f;
calSclY = (maxY - minY) / 2.0f; if (calSclY < 0.01f) calSclY = 1.0f;
// 保存到 NVS(掉电不丢)
prefs.begin("compass", false);
prefs.putFloat("offX", calOffX); prefs.putFloat("offY", calOffY);
prefs.putFloat("sclX", calSclX); prefs.putFloat("sclY", calSclY);
prefs.end();
// 校准结果画面
canvas->fillScreen(C_BG);
canvas->setTextColor(0x07E0); canvas->setTextSize(2);
canvas->setCursor(30, 88); canvas->print("CAL DONE!");
canvas->setTextColor(C_MAJOR); canvas->setTextSize(1);
char b[44];
sprintf(b, "offX = %.1f", calOffX); canvas->setCursor(10, 120); canvas->print(b);
sprintf(b, "offY = %.1f", calOffY); canvas->setCursor(10, 133); canvas->print(b);
sprintf(b, "sclX = %.1f", calSclX); canvas->setCursor(10, 148); canvas->print(b);
sprintf(b, "sclY = %.1f", calSclY); canvas->setCursor(10, 161); canvas->print(b);
canvas->flush();
delay(3000);
}
// ─────────────────────────────────────────────
// 从 NVS 加载上次保存的校准数据
// ─────────────────────────────────────────────
void loadCalibration() {
prefs.begin("compass", true);
calOffX = prefs.getFloat("offX", 0.0f);
calOffY = prefs.getFloat("offY", 0.0f);
calSclX = prefs.getFloat("sclX", 1.0f);
calSclY = prefs.getFloat("sclY", 1.0f);
prefs.end();
if (calSclX < 0.01f) calSclX = 1.0f;
if (calSclY < 0.01f) calSclY = 1.0f;
Serial.printf("[CAL] off=(%.2f, %.2f) scl=(%.2f, %.2f)\n",
calOffX, calOffY, calSclX, calSclY);
}
// ─────────────────────────────────────────────
// Setup
// ─────────────────────────────────────────────
void setup() {
Serial.begin(115200);
pinMode(TFT_BL, OUTPUT); digitalWrite(TFT_BL, HIGH); // 背光点亮
pinMode(CAL_BTN, INPUT_PULLUP);
gfx->begin();
canvas->begin(); // 分配帧缓冲,此时消耗约 115 KB 内存
Wire.begin(I2C_SDA, I2C_SCL);
Wire.setClock(400000); // 400 kHz 快速模式,降低 I2C 读取延迟
if (!mag.begin()) {
// 传感器找不到时,屏幕显示红色错误提示
canvas->fillScreen(0xF800);
canvas->setTextColor(0xFFFF); canvas->setTextSize(2);
canvas->setCursor(10, 100); canvas->print("SENSOR ERROR");
canvas->setCursor(10, 125); canvas->print("Check wiring!");
canvas->flush();
while (1) delay(500);
}
loadCalibration();
// 上电时按住 BOOT(GPIO0) → 进入旋转校准
if (digitalRead(CAL_BTN) == LOW) {
canvas->fillScreen(C_BG);
canvas->setTextColor(C_DIR); canvas->setTextSize(1);
canvas->setCursor(10, 112); canvas->print("Release to start cal...");
canvas->flush();
while (digitalRead(CAL_BTN) == LOW) delay(10);
delay(500);
runCalibration();
}
// 丢弃前几个不稳定的热机读数
for (int i = 0; i < 8; i++) {
sensors_event_t ev; mag.getEvent(&ev); delay(15);
}
gSmooth = readHeading();
gFirstRead = false;
}
// ─────────────────────────────────────────────
// Loop:读数 → 滤波 → 渲染,循环约 25fps
// ─────────────────────────────────────────────
void loop() {
float raw = readHeading();
gSmooth = emaFilter(raw);
drawFrame(gSmooth);
delay(30); // 30ms ≈ 33fps,实际加上渲染时间约 25fps
}代码说明
为什么要用 Canvas? Arduino_Canvas 相当于在内存里开了一块 115KB 的”草稿纸”,先把整帧画完,再用 canvas->flush() 一次性推到屏幕。如果直接往屏幕上画,每一笔都会立刻显示,指针转动时会明显闪烁。Canvas 解决了这个问题,代价是多占一块内存。
readHeading() 做了什么? 从传感器拿到的 X/Y 磁场强度,减去硬铁偏移(消除固定磁场干扰),再除以软铁缩放系数(修正各轴灵敏度不一致),最后加上磁偏角修正,得到真北方向的角度。
emaFilter() 为什么要处理环绕? 如果指针从 359° 转到 1°,两个读数之差是 -358°,如果直接做加权平均,指针会反方向转一大圈。代码里先把差值限制在 [-180°, +180°] 范围内,再做平滑,就能正确处理跨越 0° 的情况。
校准原理是什么? 在水平面内转一圈,传感器的 X/Y 读数会描绘出一个椭圆(理想情况是圆)。记录最大最小值,中点就是硬铁偏移,半径就是软铁缩放系数。校准完成后,数据存入 NVS(类似手机里的 EEPROM),下次上电自动加载,不需要每次重新校准。
常见问题排查
别慌,90% 的问题出在这几个地方。
屏幕全黑或全白,什么都不显示。 先检查 BL(背光)引脚是否高电平——如果接的是 GPIO7,确认代码里有 digitalWrite(TFT_BL, HIGH);如果直接接 3.3V,背光应该一直亮,黑屏说明别的引脚有问题。再对照接线表逐根确认 CS、DC、RST 是否接到了正确的 GPIO,其中 CS 和 DC 接反是高频失误。
串口打印 SENSOR ERROR,屏幕显示红色报错。 磁力计没响应,大概率是 I2C 接线问题——SDA/SCL 接反了,或者接到了不同的 GPIO。确认 Wire.begin(13, 14) 对应的是你实际接的引脚。另一个可能是模块没有 3.3V 供电,用万用表量一下 VCC 脚。
指针乱跳,完全不准,或者一直停在某个方向不动。 最可能的原因是你的模块是 QMC5883L(0x0D),但代码用的是 HMC5883L 的库——两个库寄存器定义完全不同,读出来的数就是乱的。先跑 I2C 扫描确认地址,如果是 0x0D,需要把代码里的 #include <Adafruit_HMC5883_U.h> 和传感器对象换成 QMC5883LCompass 库的写法,网上有现成的适配示例。
校准完了,但指向还是偏了 10°~20°。 检查 DECLINATION_DEG 有没有改成你所在城市的值,这个参数差了 5° 就会让所有方向都系统性偏移。东京约 -7.5°,北京约 -6.5°,准确值用文末的 NOAA 工具查询。另一个原因是校准时周围有强磁场(手机、螺丝刀、音箱磁铁),换个空旷的地方重新校准一次。
编译报错 Adafruit_HMC5883_U.h: No such file or directory。 库没装或者装错了。打开 Arduino IDE → 工具 → 管理库,搜索 HMC5883,安装 Adafruit HMC5883 Unified 以及它依赖的 Adafruit Unified Sensor。
FAQ 问答
Q:HMC5883L 和 QMC5883L 有什么区别?能用同一个库驱动吗? A:不能混用。两者引脚完全兼容(焊上去外形一样),但内部寄存器地址不同,驱动协议不同,用错库读出来全是无意义的数值。HMC5883L 的 I2C 地址是 0x1E,QMC5883L 是 0x0D,用 I2C 扫描一秒钟就能确认。
Q:BL 背光引脚能直接接 3.3V 吗,还是必须接 GPIO? A:直接接 3.3V 完全可以,屏幕会全程常亮。用 GPIO 控制的好处是可以在代码里控制亮度或者休眠时关掉背光省电。如果不需要这些功能,接 3.3V 省一个 GPIO。
Q:DECLINATION_DEG 怎么查我城市的准确值?
A:用 NOAA 提供的磁偏角计算工具(见文末参考资料),输入你的城市坐标,Model 选 WMM,会给出当前日期的精确磁偏角。偏东为正值,偏西为负值。日本东部城市普遍在 -7° 到 -8° 之间,中国东部沿海约 -5° 到 -6°。
Q:EMA_ALPHA 调大或调小有什么区别?
A:alpha 越大,指针响应越快,但越容易抖动;越小,指针越平滑,但转动时有明显的拖尾感。0.15 适合平放在桌面的场景;如果是手持走动,可以调到 0.25 ~ 0.3。取值范围是 0.0(完全不动)到 1.0(不滤波,原始值)。
Q:校准数据存在哪?换了电脑重新烧录代码后还在吗? A:校准数据存在 ESP32 的 NVS(非易失性存储,类似 EEPROM),烧录新代码不会清除 NVS,下次上电直接加载。只有执行”擦除所有 Flash”操作时才会丢失,届时需要重新校准一次。
Q:115 KB 的帧缓冲会不会太大?ESP32-C3 能用吗? A:ESP32-S3 有 512KB SRAM,115KB 没问题。ESP32-C3 只有 400KB SRAM,加上代码和堆栈,实测会比较紧张,建议用 PSRAM 版本或者改用更小尺寸的屏幕。原版 ESP32(WROOM / WROVER)的 SRAM 更少,WROVER 版带 PSRAM 的可以用,WROOM 无 PSRAM 版大概率 OOM 崩溃。
Q:为什么我的指南针和手机差了十几度,是正常的吗? A:在这套方案里,差十几度是完全正常的现象,不是 bug。HMC5883L/QMC5883L 在有干扰的真实环境里,±10°~±15° 是常见误差范围。如果误差稳定在 ±5° 以内,已经算校准得不错了。想让误差更小,需要换精度更高的传感器并引入九轴融合,单靠调参数不够。
Q:能不能用这套方案做正式的导航或定向产品? A:不推荐。精度只有 ±5°~±15°,受周围磁场环境影响大,也没有倾斜补偿——只要不是严格水平放置,误差就会明显增大。做演示、学习原理、当桌面摆件完全够用;需要实际导航精度的场合,建议换 ICM-20948 这类带硬件传感器融合的方案。
HMC5883L 适不适合正式项目?
直接说结论:不适合。
实验演示没问题,学习驱动流程、展示 maker 项目、桌面摆件——都可以。但如果你在做一个真正需要方向感知的产品,这套方案有三个绕不过去的问题:
第一,没有倾斜补偿。模块一旦不是水平放置,方位角误差就快速增加——歪 20° 能带来超过 10° 的方向偏差。iPhone 用加速度计实时补偿这个误差,这块模块本身做不到,需要额外接 MPU6050 并修改算法。
第二,受环境磁场影响严重。旁边的电脑电源、USB 线、金属支架都会污染读数,而且这种干扰是动态的,校准一次存入 NVS 并不能补偿运动中实时变化的磁场。
第三,市售模块质量参差不齐。大多数是 QMC5883L 仿制版,没有原版 HMC5883L 的片上温漂补偿,温度变化时读数会飘。
如果你的项目需要可靠的方向感知,更合适的选择是 ICM-20948(集成九轴传感器 + 硬件 DMP 融合),或者直接用 GPS 模块结合两点坐标计算朝向——精度和稳定性不是一个量级。
这个项目的正确定位是:麻雀虽小五脏俱全的学习样本。它让你完整走一遍”磁力计驱动 → 硬铁校准 → 滤波 → 显示”的完整链路,这套知识用到更好的传感器上完全通用。
延伸玩法
做完基础款,有几个方向可以接着探索:
加一块 MPU6050 六轴传感器,读取加速度计数据做倾斜补偿。这是上面提到的最大局限之一——现在这个版本只有 2D 磁场,设备稍微歪一点就会产生明显误差;加上倾斜补偿后竖着拿也能保持准确,这也是 iPhone 指南针稳定的核心原因之一。这是让这个项目”从玩具升级到可用”最值得做的一步。
接一块 SD 卡模块,用 LVGL 或者自己画的地图叠加指南针方向,做一个离线导航仪。圆屏的显示面积有限,但显示当前朝向和目标方向的箭头完全够用。
把方位角数据通过 Wi-Fi 推送到 MQTT broker,接入 Home Assistant 或者自己的 dashboard,做成一个桌面方向感知传感器,用于判断门窗朝向或天线对准。
参考资料
- HMC5883L 原厂数据手册(Honeywell):https://cdn-shop.adafruit.com/datasheets/HMC5883L_3-Axis_Digital_Compass_IC.pdf
- QMC5883L 数据手册(QST):https://datasheetspdf.com/pdf/1309218/QST/QMC5883L/1
- Arduino_GFX_Library GitHub:https://github.com/moononournation/Arduino_GFX
- Adafruit_HMC5883_U GitHub:https://github.com/adafruit/Adafruit_HMC5883_U
- ESP32-S3 产品页(Espressif):https://www.espressif.com/en/products/socs/esp32-s3
- 磁偏角查询工具(NOAA):https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml