ESP32-S3 + GC9A01 + MPU6050 数字水平仪完整教程(SPI + I2C + Arduino)
难度:⭐⭐☆☆☆(新手可上手) 预计时间:45 分钟 测试环境:Arduino IDE 2.3.8 | Arduino_GFX_Library v1.6.5 | MPU6050_light v1.2.1
一句话摘要:ESP32-S3 驱动 GC9A01 圆形 TFT + MPU6050 六轴传感器,做一个实时气泡水平仪,气泡颜色随倾斜角度变化(绿→黄→红),附完整接线表和 Arduino 代码。
TL;DR(快速上手):
- MPU6050 接线:SDA → GPIO 15,SCL → GPIO 16,AD0 → GND(固定 I2C 地址 0x68)
- GC9A01 接线:CLK → GPIO 12,MOSI → GPIO 11,CS → GPIO 9,DC → GPIO 10,RST → GPIO 18,BL → GPIO 7
- 安装库:
GFX Library for Arduino(作者 moononournation)+MPU6050_light(作者 rfetick)- 烧录代码,上电后保持水平静置约 1 秒等校准提示消失,然后随意倾斜看气泡跑
前言
你有没有试过徒手安装一块搁板,觉得”差不多水平了”,放上东西才发现所有东西都在往一边溜?
我就是这种人。本来是借不到传统水平仪,想着翻翻零件盒碰碰运气——结果圆形屏 GC9A01 和 MPU6050 都在角落里吃灰,两个凑在一起刚好就是一个数字水平仪的全部原料。
更妙的是,圆形屏做水平仪在视觉上也天作之合:气泡居中 = 绿色,偏一点 = 黄色,倾斜过头 = 红色,一眼就看懂,不需要任何说明书。
本文目标:从零开始,接线 → 装库 → 烧代码 → 看气泡动,照着做就能复现。
实验效果
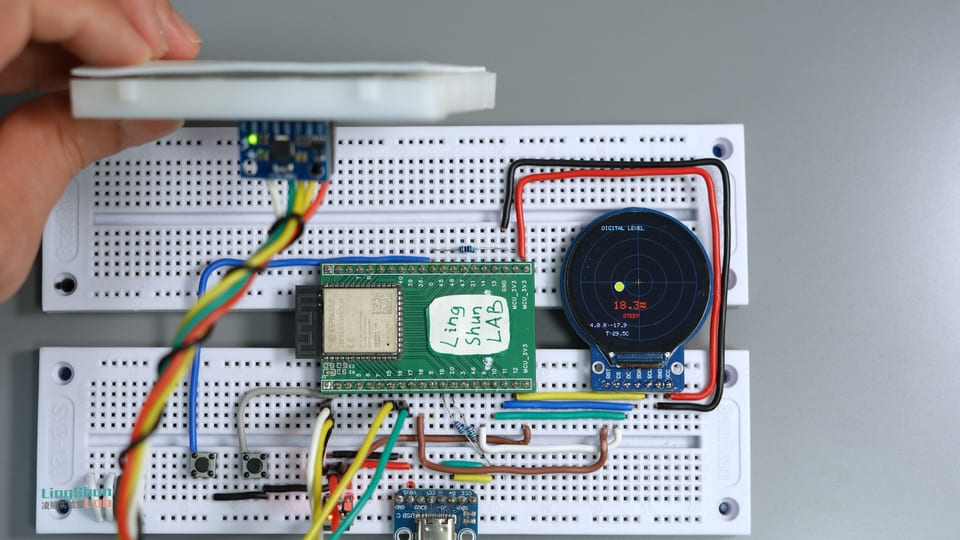
屏幕实时显示四项内容:
- 中央气泡:随设备倾斜移动,颜色三段指示(绿 = 水平 / 黄 = 轻微倾斜 / 红 = 明显倾斜)
- 合成倾斜角(°):Pitch 和 Roll 的合成值,大字显示
- Pitch / Roll 分项数值:俯仰角与横滚角各自的读数
- 芯片温度:MPU6050 内置温度传感器的读数(比室温偏高属正常,后文有说明)
元件说明
GC9A01 圆形 TFT 显示屏
把它想象成一块被专门裁成圆形的手机屏——240×240 的分辨率不算顶尖,但贴着圆形玻璃放在桌上,做水平仪的表盘简直是为它量身定制的。
| 参数 | 数值 |
|---|---|
| 分辨率 | 240 × 240 px(圆形显示区域) |
| 接口 | SPI(最高 80 MHz) |
| 供电 | 3.3V |
| 色深 | 65K 色(RGB565) |
| 面板类型 | IPS |
选它的原因:圆形表盘天然适配气泡水平仪造型,SPI 高速接口跑 20fps 动画完全够用。
MPU6050 六轴惯性传感器
把它想象成手机陀螺仪和加速度计的合体版——手机自动旋转屏幕、微信运动计步,用的就是同类芯片。MPU6050 把三轴加速度计(感知倾斜方向)和三轴陀螺仪(感知旋转速率)塞进同一颗 4mm × 4mm 的小芯片,还顺手附赠了一个温度传感器。
| 参数 | 数值 |
|---|---|
| 加速度量程 | ±2 / ±4 / ±8 / ±16 g(可配置) |
| 陀螺仪量程 | ±250 / ±500 / ±1000 / ±2000 °/s(可配置) |
| ADC 分辨率 | 16 位 |
| 接口 | I2C(最高 400 kHz 快速模式) |
| 供电 | 3.3V(VDD 范围:2.375 ~ 3.46V) |
| I2C 地址 | 0x68(AD0 = GND)/ 0x69(AD0 = VCC) |
选它的原因:价格极低、库支持完善,MPU6050_light 直接输出融合角度,不用自己写卡尔曼滤波。
BOM 表
| 元件 | 型号 / 规格 | 数量 |
|---|---|---|
| 主控开发板 | ESP32-S3 | 1 |
| 圆形 TFT 屏 | GC9A01 240×240 IPS | 1 |
| 六轴传感器 | MPU6050 模块 | 1 |
| 导线 | 杜邦线 | 若干 |
元件引脚说明
GC9A01 引脚
| 引脚标注 | 功能 |
|---|---|
| VCC | 3.3V 主供电 |
| GND | 电源地 |
| SCL / CLK | SPI 时钟(SCLK) |
| SDA / MOSI | SPI 主出从入数据 |
| CS | 片选(低电平有效) |
| DC | 数据 / 命令切换 |
| RST | 硬件复位(低电平有效) |
| BL | 背光控制 |
MPU6050 引脚
| 引脚标注 | 功能 |
|---|---|
| VCC | 3.3V 主供电 |
| GND | 电源地 |
| SDA | I2C 数据线 |
| SCL | I2C 时钟线 |
| INT | 中断输出(轮询模式不接) |
| AD0 | I2C 地址选择(接 GND = 0x68) |
| XDA / XCL | 辅助 I2C 接口(本项目不接) |
接线方式
建议按下表逐行接完,每接一根在旁边打个钩,能省 80% 的排错时间。
MPU6050 → ESP32-S3
| MPU6050 引脚 | ESP32-S3 引脚 | 说明 |
|---|---|---|
| VCC | 3.3V | 主供电 |
| GND | GND | 共地 |
| SDA | GPIO 15 | I2C 数据线 |
| SCL | GPIO 16 | I2C 时钟线 |
| AD0 | GND | 固定 I2C 地址为 0x68 |
| INT / XDA / XCL | 不接 | 本项目不需要 |
关于 I2C 上拉电阻:标准做法是在 SDA 和 SCL 各接一颗 4.7kΩ 上拉电阻到 3.3V,能明显提升高速读取的抗干扰稳定性。本示例省略了这一步,但如果你要做成成品,建议加上。
GC9A01 → ESP32-S3
| GC9A01 引脚 | ESP32-S3 引脚 | 说明 |
|---|---|---|
| VCC | 3.3V | 主供电 |
| GND | GND | 共地 |
| SCL / CLK | GPIO 12 | SPI 时钟 |
| SDA / MOSI | GPIO 11 | SPI 数据 |
| CS | GPIO 9 | 片选 |
| DC | GPIO 10 | 数据 / 命令切换 |
| RST | GPIO 18 | 硬件复位 |
| BL | GPIO 7 | 背光(可选,有些模块没有这个PIN口的。代码控制高低电平,或直接接 3.3V 常亮) |
需要安装的库
在 Arduino IDE 菜单 工具 → 管理库 里搜索并安装:
| 库名称 | 作者 | 测试通过版本 |
|---|---|---|
| GFX Library for Arduino | moononournation | v1.6.5 |
| MPU6050_light | rfetick | v1.2.1 |
版本不一致可能导致 API 变动,建议安装表中版本。安装完后重启 Arduino IDE,再开项目。
完整代码
/**
* ESP32-S3 + GC9A01 + MPU6050 数字水平仪
* Digital Spirit Level
*
* 接线:
* GC9A01 → SCL=12, SDA=11, CS=9, DC=10, RST=18, BL=7
* MPU6050 → SDA=15, SCL=16, AD0=GND(I2C 地址 0x68)
*/
#include <Arduino_GFX_Library.h>
#include <Wire.h>
#include <MPU6050_light.h>
// ---- 颜色定义(RGB565 格式)----
#define COLOR_BG 0x0863 // 深色背景
#define COLOR_GRID 0x1A69 // 刻度网格线
#define COLOR_GREEN 0x07E6 // 气泡居中 → 绿色
#define COLOR_YELLOW 0xFEA0 // 轻微倾斜 → 黄色
#define COLOR_RED 0xF820 // 倾斜过大 → 红色
#define COLOR_TEXT 0xC618 // 普通文字
#define COLOR_ACCENT 0xFD20 // 中心十字线
// ---- GC9A01 SPI 引脚 ----
#define TFT_SCK 12
#define TFT_SDA 11
#define TFT_CS 9
#define TFT_DC 10
#define TFT_RST 18
#define TFT_BL 7
// ---- MPU6050 I2C 引脚(务必与接线表一致)----
#define MPU_SDA 15 // SDA → GPIO 15
#define MPU_SCL 16 // SCL → GPIO 16
// ---- 初始化显示驱动 ----
// 第一步:创建 SPI 总线,参数顺序:DC, CS, SCK, MOSI, MISO
Arduino_DataBus *bus = new Arduino_ESP32SPI(
TFT_DC, TFT_CS, TFT_SCK, TFT_SDA,
GFX_NOT_DEFINED
);
// 第二步:创建 GC9A01 屏幕对象(rotation=0,IPS 面板=true)
Arduino_GFX *gfx = new Arduino_GC9A01(
bus, TFT_RST, 0, true
);
// 第三步:创建 240×240 离屏 Canvas(双缓冲,防画面撕裂)
Arduino_Canvas *canvas = new Arduino_Canvas(
240, 240, gfx
);
// ---- MPU6050 ----
MPU6050 mpu(Wire);
// ---- 帧率控制 ----
const int16_t cx = 120, cy = 120; // 屏幕圆心坐标(像素)
unsigned long lastFrame = 0;
const int frameDelay = 1000 / 20; // 目标帧率:20fps → 每帧 50ms
// ---- 函数前向声明 ----
void drawGrid();
void drawBubble(float pitch, float roll);
void drawReadouts(float pitch, float roll, float temp);
// =============================================================
void setup() {
Serial.begin(115200);
delay(500);
Serial.println("=== ESP32-S3 数字水平仪 启动中 ===");
// 第一步:初始化屏幕和背光
gfx->begin();
pinMode(TFT_BL, OUTPUT);
digitalWrite(TFT_BL, HIGH); // 打开背光
canvas->begin();
Serial.println("[OK] 屏幕初始化完成");
// 第二步:初始化 I2C,扫描总线(方便调试时确认接线)
Wire.begin(MPU_SDA, MPU_SCL);
Serial.print("[DBG] 扫描 I2C 总线 SDA=");
Serial.print(MPU_SDA);
Serial.print(" SCL=");
Serial.println(MPU_SCL);
byte found = 0;
for (byte addr = 1; addr < 127; addr++) {
Wire.beginTransmission(addr);
if (Wire.endTransmission() == 0) {
Serial.print(" 找到 I2C 设备,地址:0x");
Serial.println(addr, HEX);
found++;
}
}
if (found == 0) {
Serial.println("[ERROR] 未找到任何 I2C 设备!请检查接线。");
}
// 第三步:初始化 MPU6050
byte status = mpu.begin();
if (status == 0) {
Serial.println("[OK] MPU6050 连接成功");
} else {
Serial.println("[ERROR] MPU6050 未响应!检查接线或 I2C 地址。");
}
// 第四步:陀螺仪自动校准(运行期间保持设备水平静置约 1 秒)
Serial.println("[DBG] 校准中,请保持设备水平,不要移动...");
canvas->fillScreen(COLOR_BG);
canvas->setTextColor(COLOR_TEXT);
canvas->setTextSize(1);
canvas->setCursor(60, 110);
canvas->print("Calibrating...");
canvas->setCursor(55, 125);
canvas->print("Keep device flat");
canvas->flush();
delay(1000);
mpu.calcOffsets(); // 自动计算加速度计和陀螺仪的零偏
Serial.print("[DBG] 加速度偏移: ");
Serial.print(mpu.getAccXoffset()); Serial.print(", ");
Serial.print(mpu.getAccYoffset()); Serial.print(", ");
Serial.println(mpu.getAccZoffset());
Serial.print("[DBG] 陀螺仪偏移: ");
Serial.print(mpu.getGyroXoffset()); Serial.print(", ");
Serial.print(mpu.getGyroYoffset()); Serial.print(", ");
Serial.println(mpu.getGyroZoffset());
Serial.println("[OK] 校准完成,开始运行!");
}
// =============================================================
static int logCnt = 0; // 调试日志节流计数器
void loop() {
unsigned long now = millis();
if (now - lastFrame < frameDelay) return; // 帧率节流
lastFrame = now;
// 第一步:读取传感器
mpu.update();
float pitch = mpu.getAngleY(); // 俯仰角(前后倾斜)
float roll = -mpu.getAngleX(); // 横滚角(左右倾斜,取反对齐视觉方向)
float temp = mpu.getTemp(); // 芯片温度(比环境温度偏高属正常)
// 调试日志:每 20 帧(约 1 秒)打印一次,不影响帧率
if (++logCnt >= 20) {
logCnt = 0;
Serial.print("[DBG] pitch="); Serial.print(pitch, 2);
Serial.print(" roll="); Serial.print(roll, 2);
Serial.print(" temp="); Serial.print(temp, 1);
Serial.print(" | accX="); Serial.print(mpu.getAccX(), 2);
Serial.print(" accY="); Serial.print(mpu.getAccY(), 2);
Serial.print(" accZ="); Serial.println(mpu.getAccZ(), 2);
}
// 第二步:限幅——超过 ±45° 时气泡贴边显示,不会跑出圆圈
pitch = constrain(pitch, -45.0f, 45.0f);
roll = constrain(roll, -45.0f, 45.0f);
// 第三步:绘制当前帧
canvas->fillScreen(COLOR_BG); // 清空画布
drawGrid(); // 刻度网格
drawBubble(pitch, roll); // 气泡
drawReadouts(pitch, roll, temp); // 数值文字
canvas->flush(); // 推送到屏幕
}
// =============================================================
// 绘制背景刻度圈和中心十字准星
void drawGrid() {
canvas->drawCircle(cx, cy, 25, COLOR_GRID);
canvas->drawCircle(cx, cy, 50, COLOR_GRID);
canvas->drawCircle(cx, cy, 80, COLOR_GRID);
canvas->drawCircle(cx, cy, 105, COLOR_GRID);
canvas->drawFastHLine(15, cy, 210, COLOR_GRID);
canvas->drawFastVLine(cx, 15, 210, COLOR_GRID);
// 中心十字准星(使用强调色,比网格更显眼)
canvas->drawFastHLine(cx - 5, cy, 10, COLOR_ACCENT);
canvas->drawFastVLine(cx, cy - 5, 10, COLOR_ACCENT);
}
// 根据 pitch/roll 角度映射气泡位置,并按距离着色
void drawBubble(float pitch, float roll) {
// ±45° 线性映射到 ±90px 偏移
int16_t bx = cx + (int16_t)(roll / 45.0f * 90.0f);
int16_t by = cy + (int16_t)(pitch / 45.0f * 90.0f);
// 计算气泡与中心的像素距离,决定颜色等级
float dist = sqrt((float)((bx - cx) * (bx - cx) + (by - cy) * (by - cy)));
uint16_t color;
if (dist < 10) color = COLOR_GREEN; // ≈ ±5° 内:水平
else if (dist < 40) color = COLOR_YELLOW; // ≈ ±20° 内:轻微倾斜
else color = COLOR_RED; // 超过 ±20°:明显倾斜
// 中心到气泡的连线 + 实心气泡 + 白色描边
canvas->drawLine(cx, cy, bx, by, COLOR_GRID);
canvas->fillCircle(bx, by, 8, color);
canvas->drawCircle(bx, by, 8, 0xFFFF);
}
// 绘制角度数值、状态文字和温度
void drawReadouts(float pitch, float roll, float temp) {
float total = sqrt(pitch * pitch + roll * roll); // 合成倾斜角
canvas->setTextSize(1);
canvas->setTextColor(COLOR_TEXT);
// 顶部标题
canvas->setCursor(55, 18);
canvas->print("DIGITAL LEVEL");
// 合成角度:大字体,颜色与气泡同步
canvas->setTextSize(2);
uint16_t color;
if (total < 1) color = COLOR_GREEN;
else if (total < 10) color = COLOR_YELLOW;
else color = COLOR_RED;
canvas->setTextColor(color);
canvas->setCursor(75, 155);
canvas->print(total, 1);
canvas->print((char)247); // ° 符号(ASCII 247)
// 状态文字
canvas->setTextSize(1);
canvas->setCursor(80, 178);
if (total < 1) canvas->print(" LEVEL");
else if (total < 10) canvas->print(" TILTED");
else canvas->print(" STEEP");
// Pitch / Roll 分项读数
canvas->setTextColor(COLOR_TEXT);
canvas->setCursor(20, 195);
canvas->print("P:"); canvas->print(pitch, 1);
canvas->print(" R:"); canvas->print(roll, 1);
// 温度(芯片结温,比室温偏高属正常现象)
canvas->setCursor(60, 210);
canvas->print("T:"); canvas->print(temp, 1);
canvas->print("C");
}代码说明
初始化流程(setup)
setup 里按顺序走四步:屏幕初始化 → I2C 扫描 → MPU6050 初始化 → 陀螺仪校准。这个时候,你的模块如何摆放,那么中心点就会设置在那个位置。
屏幕用 Arduino_Canvas 做离屏双缓冲——所有绘制先在内存里完成,最后一次性 flush() 推到屏幕,画面不会出现撕裂或中间帧。
I2C 扫描那一段会在串口打印找到的设备地址,上电第一次调试时可以先打开串口监视器确认 MPU6050 有没有接通(正常应该打印 Found I2C device at 0x68)。
mpu.calcOffsets() 是自动校准,运行约 1 秒,期间需要保持设备水平静置。每次上电都会重新校准,所以每次开机先放平,等屏幕提示消失再使用。
主循环(loop)
帧率锁定在 20fps,每帧做四件事:读传感器 → 限幅 → 绘制 → 推屏。
roll = -mpu.getAngleX() 前面加了负号——目的是让屏幕气泡的移动方向和实际倾斜方向保持一致,不取反的话气泡会往反方向跑。如果你的安装方向不同,可以自行调整正负号。
气泡颜色三段判断:距圆心 <10px 绿色,<40px 黄色,其余红色,大约对应 ±5° 以内、±20° 以内、超过 ±20°。
常见问题排查
别慌,90% 的问题就出在接线和地址这几个地方:
屏幕全白 / 全黑,没有任何显示
先确认 VCC 是否接的 3.3V 而不是 5V(GC9A01 不耐压),BL 背光引脚是否已接通。再检查 CS、DC、RST 三根线有没有接错——CS 接错屏幕不响应,RST 悬空会卡在复位状态。可以先把 BL 直接接 3.3V 常亮,如果屏幕亮白,说明屏幕没问题,是 SPI 初始化失败。
串口打印 [ERROR] 未找到任何 I2C 设备
用万用表量一下 MPU6050 的 VCC 引脚有没有 3.3V。再确认 SDA 和 SCL 没有接反(SDA → GPIO 15,SCL → GPIO 16)。AD0 必须显式接 GND,悬空状态下部分模块地址不稳定,I2C 总线会不应答。
气泡持续乱抖,无法稳定下来
上电校准时设备没有完全静置。重新上电,放在平整桌面上,等待屏幕上的校准提示消失后再使用。如果桌面本身在振动(旁边有打印机、风扇),换个位置。
Pitch 或 Roll 方向反了
根据开发板的安装方向,在代码里调整对应角度前面的正负号:pitch = mpu.getAngleY() 改为 pitch = -mpu.getAngleY(),或者调整 roll 那行,调到方向正确为止。
温度比室温高出十几度
正常现象。MPU6050 测的是芯片结温,比环境温度高 10~20°C 很常见,仅供参考。如果需要精确环境温度,接一颗独立传感器(如 DS18B20)。
画面闪烁或有撕裂感
代码已启用 Arduino_Canvas 双缓冲,正常情况下不撕裂。如果依然有问题,检查 SPI 杜邦线是否松动,线材不要超过 20cm,必要时加 100nF 去耦电容在电源引脚附近。
FAQ
Q:MPU6050 的角度更新频率是多少?
A:MPU6050_light 以 I2C 400kHz 快速模式读取,原始数据采样率最高 1kHz。本代码帧率限定 20fps,实际刷新 20Hz。如果需要更高刷新率,把 frameDelay 改为更小的值,实测 40fps 以内比较稳定(受 SPI 推屏速度限制)。
Q:引脚可以换其他的 GPIO 吗?
A:可以,修改代码顶部的 #define 宏即可。GC9A01 的 SPI 引脚建议选 ESP32-S3 硬件 SPI(GPIO 11 / 12 是 SPI2,性能最佳);MPU6050 的 I2C 引脚任意 GPIO 均可,只需代码和接线保持一致。
Q:GC9A01 能换成方形屏吗?
A:可以。把 Arduino_GC9A01 替换成对应驱动类(例如 ST7789 用 Arduino_ST7789),修改 Arduino_Canvas 的宽高和圆心坐标 cx/cy 即可,绘制逻辑不用动。
Q:ESP32-S3 的 3.3V 同时带 GC9A01 和 MPU6050 够用吗? A:够用。GC9A01 背光电流约 20mA,MPU6050 典型功耗 3.5mW(约 1mA),合计远低于开发板 3.3V 引脚通常 300~500mA 的限流。
Q:能在同一条 I2C 总线上挂两个 MPU6050 吗?
A:可以。一个 AD0 接 GND(地址 0x68),另一个 AD0 接 VCC(地址 0x69),共用同一组 SDA/SCL。代码里声明两个 MPU6050 对象并分别传入不同地址初始化即可。
Q:每次断电重启都要重新校准吗?
A:是的,本代码每次上电都在 setup() 里调用 mpu.calcOffsets() 做一次动态校准。如果你的使用场景是固定安装,可以把偏移量保存到 EEPROM,下次上电直接读取,省去校准等待时间。
延伸玩法
- 接按键切换显示模式(水平仪 / 实时角度曲线 / 温度计)
- 把校准基准值存入 EEPROM,补偿固定安装面的偏角
- 接无源蜂鸣器,水平时发出提示音
- 换一套圆形表盘皮肤,做成磁力罗盘或 G-Force 显示器