ESP32-S3 + GC9A01 + MPU6050 디지털 수평기 완벽 가이드 (SPI + I2C + Arduino)
난이도: ⭐⭐☆☆☆ (초보자도 도전 가능) 예상 소요 시간: 45분 테스트 환경: Arduino IDE 2.3.8 | Arduino_GFX_Library v1.6.5 | MPU6050_light v1.2.1
한 줄 요약: ESP32-S3이 GC9A01 원형 TFT와 MPU6050 6축 센서를 구동하여 실시간 버블 수평기를 만듭니다. 버블 색상이 기울기 각도에 따라 변하고(녹색→노란색→빨간색), 완전한接线표와 Arduino 코드를 제공합니다.
TL;DR (빠른 시작):
- MPU6050接线: SDA → GPIO 15, SCL → GPIO 16, AD0 → GND (I2C 주소 0x68 고정)
- GC9A01接线: CLK → GPIO 12, MOSI → GPIO 11, CS → GPIO 9, DC → GPIO 10, RST → GPIO 18, BL → GPIO 7
- 라이브러리 설치:
GFX Library for Arduino(작성자 moononournation) +MPU6050_light(작성자 rfetick)- 코드를 업로드하고 전원을 켠 후 수평하게 약 1초간 정지하여 캘리브레이션 메시지가 사라질 때까지 기다린 다음, 기기를 기울여 버블이 움직이는 것을 확인하세요
서론
맨손으로 선반을 설치하다가 “거의 수평인 것 같다”고 생각한 적 있으신가요? 그리고 물건을 올려놓고 나서야 모든 것이 한쪽으로 미끄러지는 것을 발견하신 적요?
저도 그런 사람이었습니다. 마침 전통적인 수평기를 빌릴 수 없어서 부품 상자를 뒤져보았습니다. 그랬더니 원형 화면 GC9A01과 MPU6050이 구석에서 먼지를 먹고 있더군요. 이 둘을 합치면 디지털 수평기를 만들기에 딱 좋은 재료가 되었습니다.
더 좋은 점은 원형 화면이 수평기와 시각적으로 완벽한 조합이라는 것입니다. 버블이 중앙에 있으면 녹색, 조금 벗어나면 노란색, 너무 기울어지면 빨간색으로 한눈에 알 수 있어, 설명서가 필요 없습니다.
본 글의 목표: 처음부터接线 → 라이브러리 설치 → 코드 업로드 → 버블 움직임 확인까지, 따라 하면 그대로 재현할 수 있습니다.
실험 결과
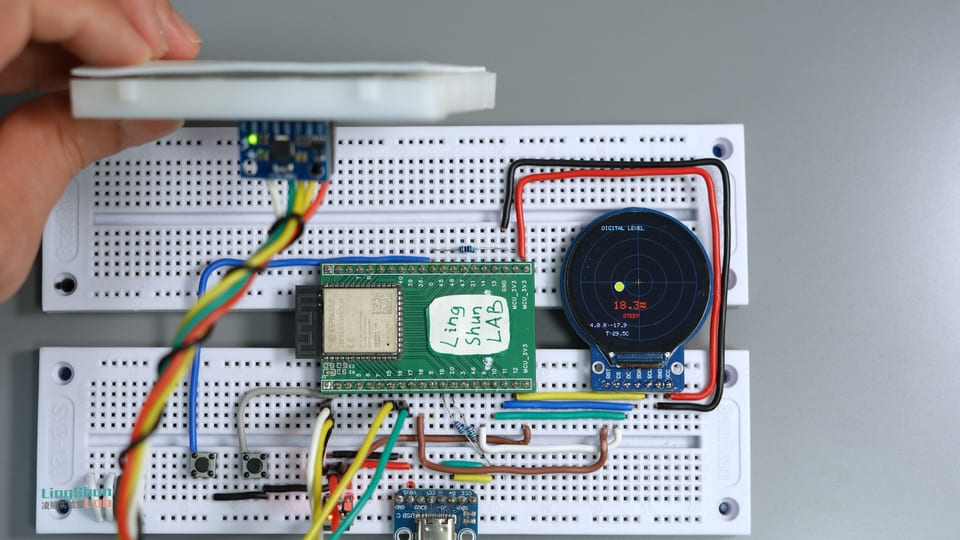
화면에 네 가지 정보가 실시간으로 표시됩니다:
- 중앙 버블: 기기 기울임에 따라 이동하며, 3단계 색상으로 상태를 표시합니다 (녹색 = 수평 / 노란색 = 약간 기울어짐 / 빨간색 = 많이 기울어짐)
- 합성 기울기 각도(°): Pitch와 Roll의 합성값이 큰 글씨로 표시됩니다
- Pitch / Roll 개별 수치: 피치각과 롤각 각각의 판독값
- 칩 온도: MPU6050 내장 온도 센서의 판독값 (실온보다 높은 것이 정상이며, 후문에서 설명합니다)
부품 설명
GC9A01 원형 TFT 디스플레이
원형으로 특별히 잘린 스마트폰 화면이라고 생각하면 됩니다. 240x240 해상도가 최고는 아니지만, 둥근 유리를 테이블 위에 올려놓고 수평기 다이얼로 사용하기에 더할 나위 없이 완벽합니다.
| 파라미터 | 수치 |
|---|---|
| 해상도 | 240 × 240 px (원형 표시 영역) |
| 인터페이스 | SPI (최대 80 MHz) |
| 전원 | 3.3V |
| 색 심도 | 65K 색상 (RGB565) |
| 패널 타입 | IPS |
선택 이유: 원형 다이얼이 버블 수평기 디자인에 자연스럽게 어울리며, SPI 고속 인터페이스로 20fps 애니메이션에 충분합니다.
MPU6050 6축 관성 센서
스마트폰의 자이로스코프와 가속도계를 하나로 합친 것이라고 생각하면 됩니다. 스마트폰 화면 자동 회전, 만보기 카운트 등에 사용되는 것과 같은 종류의 칩입니다. MPU6050은 3축 가속도계(기울기 방향 감지)와 3축 자이로스코프(회전 속도 감지)를 4mm × 4mm 크기의 작은 칩 하나에 넣었고, 보너스로 온도 센서도 포함되어 있습니다.
| 파라미터 | 수치 |
|---|---|
| 가속도 범위 | ±2 / ±4 / ±8 / ±16 g (설정 가능) |
| 자이로 범위 | ±250 / ±500 / ±1000 / ±2000 °/s (설정 가능) |
| ADC 해상도 | 16비트 |
| 인터페이스 | I2C (최대 400kHz 고속 모드) |
| 전원 | 3.3V (VDD 범위: 2.375 ~ 3.46V) |
| I2C 주소 | 0x68 (AD0 = GND) / 0x69 (AD0 = VCC) |
선택 이유: 가격이 매우 저렴하고 라이브러리 지원이 잘 되어 있으며, MPU6050_light가 직접 융합 각도를 출력하므로 칼만 필터를 직접 구현할 필요가 없습니다.
BOM표
| 부품 | 모델 / 사양 | 수량 |
|---|---|---|
| 메인 보드 | ESP32-S3 | 1 |
| 원형 TFT 화면 | GC9A01 240×240 IPS | 1 |
| 6축 센서 | MPU6050 모듈 | 1 |
| 점퍼 와이어 | 브레드보드 와이어 | 약간 |
부품 핀 설명
GC9A01 핀
| 핀 라벨 | 기능 |
|---|---|
| VCC | 3.3V 메인 전원 |
| GND | 접지 |
| SCL / CLK | SPI 클럭 (SCLK) |
| SDA / MOSI | SPI 마스터 출력 슬레이브 입력 데이터 |
| CS | 칩 셀렉트 (Low 활성) |
| DC | 데이터 / 명령 전환 |
| RST | 하드웨어 리셋 (Low 활성) |
| BL | 백라이트 제어 |
MPU6050 핀
| 핀 라벨 | 기능 |
|---|---|
| VCC | 3.3V 메인 전원 |
| GND | 접지 |
| SDA | I2C 데이터 라인 |
| SCL | I2C 클럭 라인 |
| INT | 인터럽트 출력 (폴링 모드에서는 미연결) |
| AD0 | I2C 주소 선택 (GND 연결 = 0x68) |
| XDA / XCL | 보조 I2C 인터페이스 (본 프로젝트에서는 미사용) |
##接线 방법
아래 표를 보고 한 줄씩接线한 후, 완료된 줄 옆에 체크 표시를 하세요. 디버깅 시간의 80%를 줄일 수 있습니다.
MPU6050 → ESP32-S3
| MPU6050 핀 | ESP32-S3 핀 | 설명 |
|---|---|---|
| VCC | 3.3V | 메인 전원 |
| GND | GND | 공통 그라운드 |
| SDA | GPIO 15 | I2C 데이터 라인 |
| SCL | GPIO 16 | I2C 클럭 라인 |
| AD0 | GND | I2C 주소를 0x68로 고정 |
| INT / XDA / XCL | 미연결 | 본 프로젝트에서 불필요 |
I2C 풀업 저항에 대하여: 표준적으로 SDA와 SCL에 각각 4.7kΩ 풀업 저항을 3.3V에 연결하는 것이 좋으며, 고속 읽기 시 노이즈 안정성이 크게 향상됩니다. 본 예제에서는 생략했지만, 완성품으로 만들 계획이라면 추가하는 것을 권장합니다.
GC9A01 → ESP32-S3
| GC9A01 핀 | ESP32-S3 핀 | 설명 |
|---|---|---|
| VCC | 3.3V | 메인 전원 |
| GND | GND | 공통 그라운드 |
| SCL / CLK | GPIO 12 | SPI 클럭 |
| SDA / MOSI | GPIO 11 | SPI 데이터 |
| CS | GPIO 9 | 칩 셀렉트 |
| DC | GPIO 10 | 데이터 / 명령 전환 |
| RST | GPIO 18 | 하드웨어 리셋 |
| BL | GPIO 7 | 백라이트 (선택 사항, 일부 모듈에는 이 핀이 없음. 코드로 High/Low 제어하거나 3.3V에 직접 연결하여 항상 켜기) |
설치 필요 라이브러리
Arduino IDE 메뉴 툴 → 라이브러리 관리에서 검색하여 설치하세요:
| 라이브러리 이름 | 작성자 | 테스트 완료 버전 |
|---|---|---|
| GFX Library for Arduino | moononournation | v1.6.5 |
| MPU6050_light | rfetick | v1.2.1 |
버전이 다르면 API가 변경될 수 있으므로 표의 버전을 설치하는 것을 권장합니다. 설치 완료 후 Arduino IDE를 재시작하고 프로젝트를 여세요.
전체 코드
/**
* ESP32-S3 + GC9A01 + MPU6050 디지털 수평기
* Digital Spirit Level
*
*接线:
* GC9A01 → SCL=12, SDA=11, CS=9, DC=10, RST=18, BL=7
* MPU6050 → SDA=15, SCL=16, AD0=GND (I2C 주소 0x68)
*/
#include <Arduino_GFX_Library.h>
#include <Wire.h>
#include <MPU6050_light.h>
// ---- 색상 정의 (RGB565 형식) ----
#define COLOR_BG 0x0863 // 어두운 배경
#define COLOR_GRID 0x1A69 // 눈금 격자선
#define COLOR_GREEN 0x07E6 // 버블 중앙 → 녹색
#define COLOR_YELLOW 0xFEA0 // 약간 기울어짐 → 노란색
#define COLOR_RED 0xF820 // 기울기 과다 → 빨간색
#define COLOR_TEXT 0xC618 // 일반 텍스트
#define COLOR_ACCENT 0xFD20 // 중앙 십자선
// ---- GC9A01 SPI 핀 ----
#define TFT_SCK 12
#define TFT_SDA 11
#define TFT_CS 9
#define TFT_DC 10
#define TFT_RST 18
#define TFT_BL 7
// ---- MPU6050 I2C 핀 (반드시接线표와 일치해야 함) ----
#define MPU_SDA 15 // SDA → GPIO 15
#define MPU_SCL 16 // SCL → GPIO 16
// ---- 디스플레이 드라이버 초기화 ----
// 1단계: SPI 버스 생성, 파라미터 순서: DC, CS, SCK, MOSI, MISO
Arduino_DataBus *bus = new Arduino_ESP32SPI(
TFT_DC, TFT_CS, TFT_SCK, TFT_SDA,
GFX_NOT_DEFINED
);
// 2단계: GC9A01 화면 객체 생성 (rotation=0, IPS 패널=true)
Arduino_GFX *gfx = new Arduino_GC9A01(
bus, TFT_RST, 0, true
);
// 3단계: 240×240 오프스크린 캔버스 생성 (이중 버퍼링, 화면 찢어짐 방지)
Arduino_Canvas *canvas = new Arduino_Canvas(
240, 240, gfx
);
// ---- MPU6050 ----
MPU6050 mpu(Wire);
// ---- 프레임 속도 제어 ----
const int16_t cx = 120, cy = 120; // 화면 중심 좌표 (픽셀)
unsigned long lastFrame = 0;
const int frameDelay = 1000 / 20; // 목표 프레임 속도: 20fps → 프레임당 50ms
// ---- 함수 전방 선언 ----
void drawGrid();
void drawBubble(float pitch, float roll);
void drawReadouts(float pitch, float roll, float temp);
// =============================================================
void setup() {
Serial.begin(115200);
delay(500);
Serial.println("=== ESP32-S3 디지털 수평기 시작 중 ===");
// 1단계: 화면 및 백라이트 초기화
gfx->begin();
pinMode(TFT_BL, OUTPUT);
digitalWrite(TFT_BL, HIGH); // 백라이트 켜기
canvas->begin();
Serial.println("[OK] 화면 초기화 완료");
// 2단계: I2C 초기화, 버스 스캔 (디버깅 시接线 확인에 유용)
Wire.begin(MPU_SDA, MPU_SCL);
Serial.print("[DBG] I2C 버스 스캔 SDA=");
Serial.print(MPU_SDA);
Serial.print(" SCL=");
Serial.println(MPU_SCL);
byte found = 0;
for (byte addr = 1; addr < 127; addr++) {
Wire.beginTransmission(addr);
if (Wire.endTransmission() == 0) {
Serial.print(" I2C 장치 발견, 주소: 0x");
Serial.println(addr, HEX);
found++;
}
}
if (found == 0) {
Serial.println("[ERROR] I2C 장치를 찾을 수 없습니다!接线를 확인하세요.");
}
// 3단계: MPU6050 초기화
byte status = mpu.begin();
if (status == 0) {
Serial.println("[OK] MPU6050 연결 성공");
} else {
Serial.println("[ERROR] MPU6050 응답 없음!接线 또는 I2C 주소를 확인하세요.");
}
// 4단계: 자이로스코프 자동 캘리브레이션 (약 1초간 기기를 수평하게 정지 상태로 유지)
Serial.println("[DBG] 캘리브레이션 중, 기기를 수평하게 유지하고 움직이지 마세요...");
canvas->fillScreen(COLOR_BG);
canvas->setTextColor(COLOR_TEXT);
canvas->setTextSize(1);
canvas->setCursor(60, 110);
canvas->print("Calibrating...");
canvas->setCursor(55, 125);
canvas->print("Keep device flat");
canvas->flush();
delay(1000);
mpu.calcOffsets(); // 가속도계와 자이로스코프의 영점 오프셋 자동 계산
Serial.print("[DBG] 가속도 오프셋: ");
Serial.print(mpu.getAccXoffset()); Serial.print(", ");
Serial.print(mpu.getAccYoffset()); Serial.print(", ");
Serial.println(mpu.getAccZoffset());
Serial.print("[DBG] 자이로 오프셋: ");
Serial.print(mpu.getGyroXoffset()); Serial.print(", ");
Serial.print(mpu.getGyroYoffset()); Serial.print(", ");
Serial.println(mpu.getGyroZoffset());
Serial.println("[OK] 캘리브레이션 완료, 실행 시작!");
}
// =============================================================
static int logCnt = 0; // 디버그 로그 제한 카운터
void loop() {
unsigned long now = millis();
if (now - lastFrame < frameDelay) return; // 프레임 속도 제한
lastFrame = now;
// 1단계: 센서 읽기
mpu.update();
float pitch = mpu.getAngleY(); // 피치각 (전후 기울기)
float roll = -mpu.getAngleX(); // 롤각 (좌우 기울기, 부호 반전으로 시각 방향 일치)
float temp = mpu.getTemp(); // 칩 온도 (실온보다 높은 것이 정상)
// 디버그 로그: 20프레임마다 (약 1초) 한 번 출력, 프레임 속도에 영향 없음
if (++logCnt >= 20) {
logCnt = 0;
Serial.print("[DBG] pitch="); Serial.print(pitch, 2);
Serial.print(" roll="); Serial.print(roll, 2);
Serial.print(" temp="); Serial.print(temp, 1);
Serial.print(" | accX="); Serial.print(mpu.getAccX(), 2);
Serial.print(" accY="); Serial.print(mpu.getAccY(), 2);
Serial.print(" accZ="); Serial.println(mpu.getAccZ(), 2);
}
// 2단계: 범위 제한 — ±45° 초과 시 버블이 가장자리에 고정, 원 밖으로 나가지 않음
pitch = constrain(pitch, -45.0f, 45.0f);
roll = constrain(roll, -45.0f, 45.0f);
// 3단계: 현재 프레임 그리기
canvas->fillScreen(COLOR_BG); // 캔버스 지우기
drawGrid(); // 눈금 격자
drawBubble(pitch, roll); // 버블
drawReadouts(pitch, roll, temp); // 수치 텍스트
canvas->flush(); // 화면에 출력
}
// =============================================================
// 배경 눈금 원과 중앙 십자선 그리기
void drawGrid() {
canvas->drawCircle(cx, cy, 25, COLOR_GRID);
canvas->drawCircle(cx, cy, 50, COLOR_GRID);
canvas->drawCircle(cx, cy, 80, COLOR_GRID);
canvas->drawCircle(cx, cy, 105, COLOR_GRID);
canvas->drawFastHLine(15, cy, 210, COLOR_GRID);
canvas->drawFastVLine(cx, 15, 210, COLOR_GRID);
// 중앙 십자선 (강조 색상 사용, 격자보다 눈에 띔)
canvas->drawFastHLine(cx - 5, cy, 10, COLOR_ACCENT);
canvas->drawFastVLine(cx, cy - 5, 10, COLOR_ACCENT);
}
// 피치/롤 각도에 따라 버블 위치를 매핑하고 거리에 따라 색상 지정
void drawBubble(float pitch, float roll) {
// ±45°를 ±90px 오프셋으로 선형 매핑
int16_t bx = cx + (int16_t)(roll / 45.0f * 90.0f);
int16_t by = cy + (int16_t)(pitch / 45.0f * 90.0f);
// 버블과 중심의 픽셀 거리 계산, 색상 등급 결정
float dist = sqrt((float)((bx - cx) * (bx - cx) + (by - cy) * (by - cy)));
uint16_t color;
if (dist < 10) color = COLOR_GREEN; // 약 ±5° 이내: 수평
else if (dist < 40) color = COLOR_YELLOW; // 약 ±20° 이내: 약간 기울어짐
else color = COLOR_RED; // ±20° 초과: 많이 기울어짐
// 중심에서 버블까지의 선 + 채워진 버블 + 흰색 테두리
canvas->drawLine(cx, cy, bx, by, COLOR_GRID);
canvas->fillCircle(bx, by, 8, color);
canvas->drawCircle(bx, by, 8, 0xFFFF);
}
// 각도 수치, 상태 텍스트 및 온도 그리기
void drawReadouts(float pitch, float roll, float temp) {
float total = sqrt(pitch * pitch + roll * roll); // 합성 기울기 각도
canvas->setTextSize(1);
canvas->setTextColor(COLOR_TEXT);
// 상단 제목
canvas->setCursor(55, 18);
canvas->print("DIGITAL LEVEL");
// 합성 각도: 큰 글꼴, 버블과 동일한 색상
canvas->setTextSize(2);
uint16_t color;
if (total < 1) color = COLOR_GREEN;
else if (total < 10) color = COLOR_YELLOW;
else color = COLOR_RED;
canvas->setTextColor(color);
canvas->setCursor(75, 155);
canvas->print(total, 1);
canvas->print((char)247); // ° 기호 (ASCII 247)
// 상태 텍스트
canvas->setTextSize(1);
canvas->setCursor(80, 178);
if (total < 1) canvas->print(" LEVEL");
else if (total < 10) canvas->print(" TILTED");
else canvas->print(" STEEP");
// Pitch / Roll 개별 판독값
canvas->setTextColor(COLOR_TEXT);
canvas->setCursor(20, 195);
canvas->print("P:"); canvas->print(pitch, 1);
canvas->print(" R:"); canvas->print(roll, 1);
// 온도 (칩 접합부 온도, 실온보다 높은 것이 정상)
canvas->setCursor(60, 210);
canvas->print("T:"); canvas->print(temp, 1);
canvas->print("C");
}코드 설명
초기화 과정 (setup)
setup에서는 네 단계를 순서대로 실행합니다: 화면 초기화 → I2C 스캔 → MPU6050 초기화 → 자이로스코프 캘리브레이션. 이때 모듈을 어떻게 놓느냐에 따라 중심점이 해당 위치에 설정됩니다.
화면은 Arduino_Canvas를 사용하여 오프스크린 이중 버퍼링을 구현합니다. 모든 그리기 작업이 먼저 메모리에서 완료된 후, 마지막에 한 번에 flush()로 화면에 출력되므로 화면 찢어짐이나 중간 프레임이 나타나지 않습니다.
I2C 스캔 부분은 시리얼 포트에 발견된 장치 주소를 출력합니다. 처음 전원을 켤 때 시리얼 모니터를 열어 MPU6050이 제대로 연결되었는지 확인할 수 있습니다 (정상적으로는 I2C 장치 발견, 주소: 0x68이 출력됨).
mpu.calcOffsets()은 자동 캘리브레이션으로 약 1초가 소요되며, 그 동안 기기를 수평하게 정지 상태로 유지해야 합니다. 매 전원 인가 시마다 캘리브레이션이 다시 실행되므로, 매번 켤 때 먼저 평평한 곳에 놓고 화면 안내가 사라진 후 사용하세요.
메인 루프 (loop)
프레임 속도를 20fps로 고정하고, 매 프레임마다 네 가지 작업을 수행합니다: 센서 읽기 → 범위 제한 → 그리기 → 화면 출력.
roll = -mpu.getAngleX() 앞에 마이너스 부호가 있는 이유는 화면의 버블 이동 방향과 실제 기울기 방향을 일치시키기 위함입니다. 부호를 반전하지 않으면 버블이 반대 방향으로 움직입니다. 설치 방향이 다른 경우 부호를 직접 조정할 수 있습니다.
버블 색상은 3단계로 판단합니다: 원심으로부터 <10px 녹색, <40px 노란색, 나머지 빨간색으로, 대략 ±5° 이내, ±20° 이내, ±20° 초과에 해당합니다.
일반적인 문제 해결
당황하지 마세요. 문제의 90%는接线와 주소 설정에서 발생합니다:
화면이 전체 하얀색 / 검은색이고 아무것도 표시되지 않음
먼저 VCC가 3.3V에 연결되어 있는지 확인하세요 (5V가 아님, GC9A01은 내압이 낮습니다). BL 백라이트 핀이 연결되어 있는지도 확인하세요. CS, DC, RST 세 가지 선이 잘못 연결되지 않았는지 확인합니다. CS가 잘못되면 화면이 응답하지 않고, RST가 떠 있으면 리셋 상태에서 멈춥니다. 먼저 BL을 3.3V에 직접 연결하여 항상 켜보세요. 화면이 하얗게 빛나면 화면 자체는 문제없고 SPI 초기화 실패입니다.
시리얼 출력에 [ERROR] I2C 장치를 찾을 수 없습니다가 표시됨
멀티미터로 MPU6050의 VCC 핀에 3.3V가 인가되는지 확인하세요. SDA와 SCL이 반대로 연결되지 않았는지 확인합니다 (SDA → GPIO 15, SCL → GPIO 16). AD0는 반드시 GND에 명시적으로 연결해야 합니다. 떠 있는 상태에서는 일부 모듈의 주소가 불안정해져 I2C 버스가 응답하지 않습니다.
버블이 계속 흔들리며 안정되지 않음
전원 인가 후 캘리브레이션 시 기기가 완전히 정지 상태가 아니었을 가능성이 높습니다. 다시 전원을 켜고 평평한 테이블 위에 놓은 후 화면의 캘리브레이션 안내가 사라질 때까지 기다리세요. 테이블 자체가 진동하고 있다면 (옆에 프린터, 팬이 있는 경우) 다른 위치로 이동하세요.
Pitch 또는 Roll 방향이 반대임
개발 보드의 설치 방향에 따라 코드에서 해당 각도 앞의 부호를 조정하세요: pitch = mpu.getAngleY()를 pitch = -mpu.getAngleY()로 변경하거나, roll 줄을 조정하여 방향이 맞을 때까지 수정합니다.
온도가 실온보다 10도 이상 높음
정상적인 현상입니다. MPU6050이 측정하는 것은 칩의 접합부 온도로, 실온보다 10~20°C 높은 것이 일반적이며 참고용으로만 사용하세요. 정확한 실온 측정이 필요하다면 별도의 온도 센서(예: DS18B20)를 연결하세요.
화면이 깜빡이거나 찢어지는 느낌
코드에서는 Arduino_Canvas 이중 버퍼링을 사용하므로 정상적으로는 찢어지지 않습니다. 그래도 문제가 있다면 SPI 브레드보드 와이어가 느슨하지 않은지 확인하고, 와이어 길이를 20cm 이하로 유지하세요. 필요시 전원 핀 근처에 100nF 디커플링 커패시터를 추가하세요.
FAQ
Q: MPU6050의 각도 업데이트 주기는 어떻게 되나요?
A: MPU6050_light는 I2C 400kHz 고속 모드로 읽으며, 원시 데이터 샘플링 속도는 최대 1kHz입니다. 본 코드의 프레임 속도는 20fps로 제한되어 실제 갱신 속도는 20Hz입니다. 더 높은 갱신 속도가 필요하면 frameDelay를 더 작은 값으로 변경하세요. 40fps 이내가 안정적으로 테스트되었습니다 (SPI 화면 출력 속도의 제한).
Q: 다른 GPIO 핀을 사용할 수 있나요?
A: 가능합니다. 코드 상단의 #define 매크로를 수정하세요. GC9A01의 SPI 핀은 ESP32-S3 하드웨어 SPI를 사용하는 것을 권장합니다 (GPIO 11 / 12는 SPI2로 성능이 가장 좋음). MPU6050의 I2C 핀은 임의의 GPIO를 사용할 수 있으며, 코드와接线만 일치하면 됩니다.
Q: GC9A01을 사각형 화면으로 교체할 수 있나요?
A: 가능합니다. Arduino_GC9A01을 해당 드라이버 클래스로 교체하고 (예: ST7789의 경우 Arduino_ST7789 사용), Arduino_Canvas의 너비/높이와 중심 좌표 cx/cy를 수정하면 됩니다. 그리기 로직은 변경할 필요가 없습니다.
Q: ESP32-S3의 3.3V로 GC9A01과 MPU6050을 동시에 구동할 수 있나요? A: 충분합니다. GC9A01 백라이트 전류는 약 20mA, MPU6050의 일반적인 소비 전력은 3.5mW (약 1mA)로, 합쳐도 개발 보드 3.3V 핀의 일반적인 한계인 300~500mA에 비해 훨씬 낮습니다.
Q: 같은 I2C 버스에 MPU6050 두 개를 연결할 수 있나요?
A: 가능합니다. 하나의 AD0를 GND에 연결 (주소 0x68), 다른 하나의 AD0를 VCC에 연결 (주소 0x69)하여 동일한 SDA/SCL을 공유합니다. 코드에서 MPU6050 객체 두 개를 선언하고 각각 다른 주소로 초기화하면 됩니다.
Q: 매번 전원을 끄고 켤 때마다 다시 캘리브레이션해야 하나요?
A: 네, 본 코드는 매 전원 인가 시 setup()에서 mpu.calcOffsets()을 호출하여 동적 캘리브레이션을 수행합니다. 고정 설치 환경에서 사용한다면 오프셋 값을 EEPROM에 저장하고, 다음 부팅 시 바로 읽어오도록 하여 캘리브레이션 대기 시간을 줄일 수 있습니다.
확장 아이디어
- 버튼을 추가하여 디스플레이 모드 전환 (수평기 / 실시간 각도 그래프 / 온도계)
- 캘리브레이션 기준값을 EEPROM에 저장하여 고정 설치면의 기울기 보정
- 패시브 부저를 연결하여 수평일 때 알림음 발생
- 다른 원형 다이얼 스킨을 적용하여 자력 나침반이나 G-Force 디스플레이로 활용